郑联语教授多年来一直从事数字化与智能制造、可重构柔性智能工装、制造系统建模与仿真等方向的研究及教学工作。在科研方面,在国内外核心期刊和国内国际会议上发表论文200余篇,曾获《机械工程学报》高影响力论文奖、《航空学报》20年(1995-2015)高被引论文奖;作为主编或副主编或编委合著 《计算机辅助设计与制造》、《智能制造工程:理论、方法与技术》、《机床数字控制技术手册》和《MasterCAM 8.0基础教程》。主持和承担了国家及国防基金、总装预研和慧眼、国防基础科研、国防技术基础、国家科技支撑、国家863以及多项与中国商飞、中航工业、航天科技、航天科工、中电科、长春一汽等大型国有企业合作项目等各类重要项目30余项。曾获部级科技进步二、三等奖及金属加工工艺创新奖各1项,软件著作权20项,申请和授权发明专利30余件;在教学方面,主讲本科生《计算机辅助设计与制造(数字化设计与制造)》(北航精品课、一流课程)、研究生学位课《制造系统建模与仿真》,指导和培养中外硕士、博士研究生80余名。曾获北航“成飞”奖教金一等奖1项,北航教学成果一、二等奖多项,多次获北航优秀博士生和硕士生指导教师。
科研工作主要围绕四个技术主题开展:I-薄壁构件智能加工、II-可穿戴扩展现实(XR)辅助智能装配、III-可重构柔性智能工装、IV-数字化集成智能管控,四个主题的相关基础技术包括数字化测量、机器人、工业智能、AR/VR/MR(XR)、建模与仿真、数据标准、系统集成等。研究主题及关系如下图。 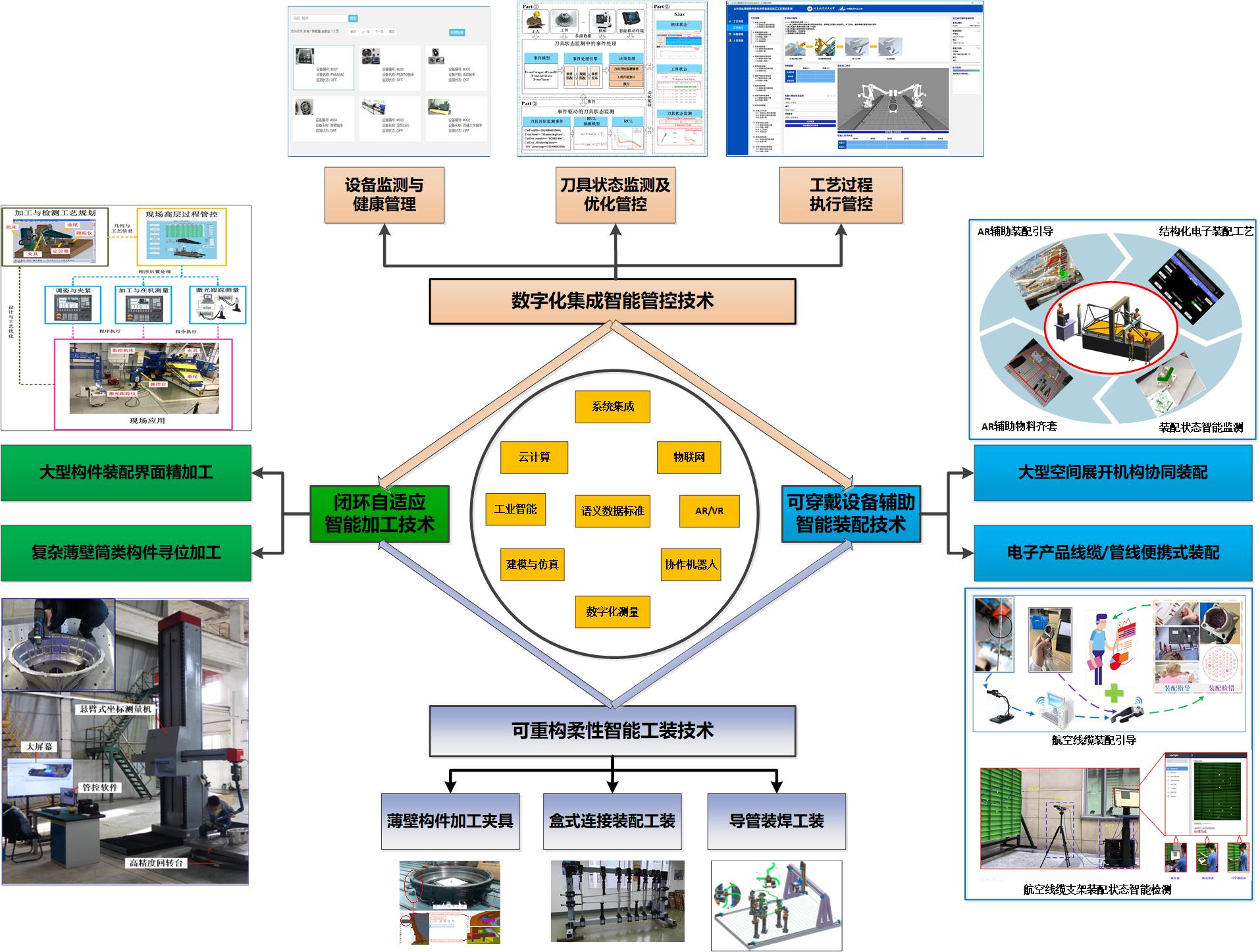 近10年来主持和承担的代表性科研项目: 主题I:大型薄壁构件智能加工技术: l虚实工艺融合的大型薄壁零件连续离散自适应加工系统精确建模与平行管控。国家自然科学基金。主持。 l大部件装配界面分体式互操作自适应精加工理论与应用基础。国家自然科学基金。主持。 l基于场模型与关键特性的大尺寸球坐标测量系统优化配置方法。国家自然科学基金,主持。 lXXX薄壁筒类构件多机器人协同高精度加工技术。基础科研项目。参与(技术负责人)。 ●超薄异形铝合金大型构件智能生产线建设技术研究。山西省重点研发项目。主持(课题)。 ●基于视觉测量的大型构件原位感知及精准定位技术研究。复杂产品智能制造系统技术国家重点实验室基金。主持。 ●高速飞行器舱段薄壁件形/性误差协同高阶补偿机理与建模研究。国家自然科学基金。参与。 主题II:可穿戴设备与AR/VR辅助智能装配技术: l面向大型XXX机构装配现场的可穿戴技术。XXX基础科研项目,主持。 l可穿戴增强现实设备辅助的智能装配技术。XXX计划项目。主持。 l混和现实装配可视化智能引导技术。北京卫星制造厂有限公司项目。主持。 l基于虚拟现实/增强现实的智能化辅助装配技术。工信部民机科研项目,参与。 l面向蒙皮阵列精准装配的容差优化与MR引导技术。国防基础科研项目,参与。 主题III:可重构柔性智能工装技术: l基于盒式连接的可重构智能装配工装型架系统。XX计划项目。主持。 l盒式连接XXXX智能装配工装技术。XXX基础科研项目,主持。 l飞机导管柔性工装智能配置与仿真软件。陕飞公司项目,主持。 l某型XXX垂尾装配型架模块化设计与分析技术研究。成飞/成都敏捷公司合作项目。主持。 l盒式连接可重构工装快速设计与分析软件。中国商飞合作项目。主持。 主题IV:车间/生产系统的数字化集成智能管控技术: l飞机典型制造车间智能管控技术。工信部民机科研项目,专题负责人。 l基于数字孪生的生产系统全要素实体精准建模。国家重点研发计划项目。参与。 lXXX薄壁筒类构件多机器人协同加工工艺管控技术及系统。基础科研项目。技术与课题负责人。 lXXX导弹对接装配数字孪生系统。科技部国家重点研发项目子课题。负责人。 l飞行器结构特征的机器人扫描测量数据处理及检测系统。北京航天新风设备公司项目。主持。 l虚实工艺融合的大型薄壁零件连续离散自适应加工系统精确建模与平行管控。国家自然科学基金。主持。 发表的代表性论著: lJian Zhou, Lianyu Zheng, YiweiWang. Collaborative Optimization for Multirobot Manufacturing System Reliability through Integration of SysML Simulation and Maintenance Knowledge Graph[J]. Journal of Manufacturing Systems, 2025, 80: 749-775. lXuexin Zhang, Lianyu Zheng, Wei Fan, et al. Multi-domain data-driven chatter detection in robotic milling under varied robot poses based on directional attention mechanism. Mechanical Systems and Signal Processing, 2025, 227: 112406. lXuexin Zhang, Lianyu Zheng, Zijie Zhao, et al. Self-adaptive modification of robot scanning path for distributed features of large-scale components based on pose estimation. Measurement 257 (2026) 118670 lWang Binbin, Zheng Lianyu, et al. LLM-based multi-agent task planning for human-robot collaborative assembly balancing operator experience and efficiency[J]. Journal of Manufacturing Systems, 2025, 82: 1020-1045 lWang Binbin, Zheng Lianyu, et al. Context-aware AR adaptive information push for product assembly: Aligning information load with human cognitive abilities[J]. Advanced Engineering Informatics, 2025; 64: 103086 lBinbin Wang, Lianyu Zheng, et al. Towards the industry 5.0 frontier: Review and prospect of XR in product assembly. Journal of Manufacturing Systems 74 (2024) 777–811. https://doi.org/10.1016/j.jmsy.2024.05.002 lJian Zhou, Lianyu Zheng. Multirobot collaborative task dynamic scheduling based on multiagent reinforcement learning with heuristic graph convolution considering robot service performance[J]. Journal of Manufacturing Systems, 2024, 72: 122-141. lJian Zhou, Lianyu Zheng, et al. Intelligent hierarchical compensation method for industrial robot positioning error based on compound branch neural network automatic creation[J]. Journal of Intelligent Manufacturing, 2024. lYiwei Wang, Meili Li, Lianyu Zheng, et al. Phyformer: A degradation physics-informed self-data driven approach to machinery prognostics. Advanced Engineering Informatics 62 (2024 ) 102772. https://doi.org/10.1016/j.aei.2024.102772 lXuexin Zhang, Liayu Zheng, et al. Knowledge graph and function block based Digital Twin modeling for robotic machining of large-scale components. Robotics and Computer-Integrated Manufacturing,2024, 85(102609):1-19.DOI: 10.1016/j.rcim.2023.102609 lXiong Zhao, Lianyu Zheng, Maoyuan Shi, et al. Unified modelling for continuous–discrete hybrid adaptive machining CPS of large thin-walled parts. International Journal of Production Research, 2023, DOI:10.1080/00207543.2023.2217304. lShuang Meng, Lianyu Zheng, Jian Zhou. Intelligent layout optimization of reconfgurable fexible fixture for assembling multiple aircraft panels. The International Journal of Advanced Manufacturing Technology, March 2023 lWei Fan,Qiang Fu,Yansheng Cao, Lianyu Zheng, et al. Binocular vision and priori data based intelligent pose measurement method of large aerospace cylindrical components. May 2023,Journal of Intelligent Manufacturing.DOI: 10.1007/s10845-023-02143-y lJian Zhou, Lianyu Zheng, et al. Adaptive positioning error compensation for long-term Service of industrial robots based on incremental learning with fixed-length memory window and incremental model reconstruction[J]. Robotics and Computer-Integrated Manufacturing, 2023, 84. lXinyu Liu, Lianyu Zheng, Yiwei Wang, et al. Human-centric collaborative assembly system for large-scale space deployable mechanism driven by Digital Twins and Wearable AR devices. Journal of Manufacturing Systems. November 2022. lZhao Xiong, Zheng Lianyu*, Wang Yahui, and Zhang Yuehong. Services-oriented intelligent milling for thin-walled parts based on time-varying information model of machining. International Journal of Mechanical Science, 2022. lJian Zhou, Lianyu Zheng, Yiwei Wang, et al. Automated model generation for machinery fault diagnosis based on reinforcement learning and neural architecture search[J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 1-12. lWang Yahui, Zheng Lianyu, Wang Yiwei, Event-driven tool condition monitoring methodology considering tool life prediction based on industrial internet. Journal of Manufacturing Systems 58 (2021) 205–222 lWang Yiwei, Deng Lei, Zheng Lianyu,Robert Gao. Temporal convolutional network with soft thresholding and attention mechanism for machinery prognostics. Journal of Manufacturing Systems 58 (2021) 205–222 lX. Zhao, L. Zheng, L. Yu, In-process adaptive milling for large-scale assembly interfaces of a vertical tail driven by real-time vibration data, Chinese Journal of Aeronautics (2021), doi: https:// doi.org/10.1016/j.cja.2021.01.025 lX. Zhao, L. Zheng.Online First-Order Machining Error Compensation for Thin-Walled Parts Considering Time-Varying Cutting Condition. Journal of Manufacturing Science and Engineering, 144 (2021): 021006-1~021006-11. l肖若瑶,郑联语等.面向筒段对接数字孪生的定位精度在线优化方法[J/OL].航空学报. 2025. https://link.cnki.net/urlid/11.1929.v.20250527.1130.006 l王艺玮,郭琦,郑联语等。增强装配工艺信息模型驱动的空间展开机构混合现实辅助装配[J]. 机械工程学报, 2025, 61(2): 371-383. l周健, 郑联语等。工业机器人定位误差在线自适应补偿[J], 机械工程学报, 2023, 59(5): 53-66. l赵子捷,郑联语等。面向大型筒件装配界面的机器人扫描测量路径规划;计算机集成制造系统、2025. l张月红,赵雄,郑联语等。面向大型异形筒类薄壁件的双工位寻位加工系统及方法[J]. 计算机集成制造系统,2024 l王艺玮,邓 蕾, 郑联语, 王亚辉。基于多通道融合及贝叶斯理论的刀具剩余寿命预测方法, 机械工程学报,2021 l刘新玉,郑联语等。协作机器人辅助的空间展开机构桁架铰链微重力装配方法。计算机集成制造系统,2021. l赵雄,郑联语等。基于优化STD法的大飞机垂尾装配界面精加工过程模态参数识别[J].航空学报,2019,40(10):315-325. l赵雄,郑联语等。实时振动数据驱动的薄壁件平铣工艺参数自适应优化. 机械工程学报, 2020. lYiwei WANG, Jian Zhou, Lianyu Zheng*, Christian GOGU.An end-to-end fault diagnostics method based on convolutional neural network for rotating machinery with multiple case studies.Journal of Intelligent Manufacturing,2020 lWang Qilong,Wei Wang*,Lianyu Zheng, Chao Yun.Force control-based vibration suppression in robotic grinding of large thin- wall shells. Robotics and Computer-Integrated Manufacturing. August 2020. lWei Fan,Wei Ji,Lihui Wang*,Lianyu Zheng,Yahui Wang.A Review on Cutting Tool Technology in Machining of Ni-Based Superalloys. International Journal of Advanced Manufacturing Technology,September 2020. lShufei Li, Pai Zheng, Lianyu Zheng*. An AR-Assisted Deep Learning Based Approach for Automatic Inspection of Aviation Connectors. IEEE Transactions on Industrial Informatics,2020,DOI: 10.1109/TII.2020.3000870. lLianyu Zheng*, Xinyu Liu, Zewu An,et al. A smart assistance system for cable assembly by combining wearable augmented reality with portable visual inspection.Virtul Reality and Intelligent Hardware.February 2020,DOI: 10.1016/j.vrih.2019.12.002 lWei Fan, Lianyu Zheng*,et al. A machining accuracy informed adaptive positioning method for finish machining of assembly interfaces of large-scale aircraft components. Robotics and Computer Integrated Manufacturing 67 (2021) 102021. https://doi.org/10.1016/j.rcim.2020.102021 lWei Fan, Lianyu Zheng,et al. Function block-based closed-loop adaptive machining for assembly interfaces of large-scale aircraft components.Robotics and Computer Integrated Manufacturing,2020,https://doi.org/10.1016/j.rcim.2020.101994 lZewu An, Yiwei Wang, Lianyu Zheng*. Adaptive Recognition of Intelligent Inspection System for Cable Brackets in Multiple Assembly Scenes.The International Journal of Advanced Manufacturing Technology. 2020,108(11):3373-3389. DOI: 10.1007/s00170-020-05591-5 lJian Zhou Lianyu Zheng,Yiwei Wang*,Christian Gogu.A multistage deep transfer learning method for machinery fault diagnostics across diverse working conditions and devices.IEEE Access,2020,DOI: 10.1109/ACCESS.2020.2990739. lWei Fang, Lianyu Zheng. Shop-floor data-driven spatial-temporal verification for manual assembly planning. Journal of Intelligent Manufacturing.2019, online 12 Stempber 2019. lWei Fan, Lianyu Zheng, et.al. Eddy Current-Based Vibration Suppression for Finish Machining of Assembly Interfaces of Large Aircraft Vertical Tail.Journal of Manufacturing Science and Engineering, 2019,141:071012-1~071012-16. lHongbo Zhang, Lianyu Zheng, et.al.Intelligent configuring for agile joint jig based on smart composite jig model. The International Journal of Advanced Manufacturing Technology. 2019, https://doi.org/10.1007/s00170-019-03803-1 lYong Zhou,Jian-Jun Yang,Lianyu Zheng.Multi-agent based hyper-heuristics for multi-objective flexible job shop scheduling: A case study in an aero-engine blade manufacturing plant.Feb 2019,IEEE Access.DOI 0.1109/ACCESS.2019.2897603, lYong Zhou,Jian-Jun Yang,Lianyu Zheng.Hyper-heuristic coevolution of machine assignment and job sequencing rules for multi-objective dynamic flexible job shop scheduling.Nov 2018,IEEE Access. lWei Fan,Lianyu Zheng,Yahui Wang.An automated reconfigurable flexible fixture for aerospace pipeline assembly before welding. International Journal of Advanced Manufacturing Technology, 2018, https://doi.org/10.1007/s00170-018-2120-9. lWei Fang, Lianyu Zheng.Rapid and robust initialization for monocular visual inertial navigation within multi-state Kalman filter. Chinese Journal of Aeronautics,2018,31(1):148-160. lPei Lei, Lianyu Zheng, Lihui Wang, et al. MTConnect compliant monitoring for finishing assembly interfaces of large-scale components: A vertical tail section application. Journal of Manufacturing Systems. 2017, 45: 121–134. http://dx.doi.org/10.1016/j.jmsy.2017.09.001 lWei Fang, Lianyu Zheng, Xiangyong Wu. Multi-sensor based real-time 6-DoF pose tracking for wearable augmented reality lComputers in Industry,2017,92:91–103. http://dx.doi.org/10.1016/j.compind.2017.06.002 lWei Fang, Lianyu Zheng, Jiaxing Xu. Self-contained optical-inertial motion capturing for assembly planning in digital factory. International Journal of Advanced Manufacturing Technology, 2017, DOI: 10.1007/s00170-017-0526-4. lWei Fang, Lianyu Zheng, Huanjun Deng and Hongbo Zhang. Real-Time Motion Tracking for Mobile Augmented/Virtual Reality Using Adaptive Visual-Inertial Fusion. Sensors 2017, 17(5), 1037; doi:10.3390/s17051037 lPei Lei, Lianyu ZHeng. An automated in-situ alignment approach for finish machining assembly interfaces of large-scale components.Robotics and Computer Integrated Manufacturing,2017,DOI:10.1016/j.rcim.2017.01.004 lPei Lei, Lianyu ZHeng, et at. A closed-loop machining system for assembly interfaces of large-scale component based on extended STEP-NC.International Journal of Advanced Manufacturing Technology. 2017, DOI: 10.1007/s00170-016-9904-6 lWei Fang, Lianyu Zheng, et al. Automatic 3D Model Acquisition for Unknown Objects based on Hybrid Vision.International Journal of Precision Engineering and Manufacturing. 2017,18(3):275-284. lHongbo Zhang, Lianyu Zheng, Xiwei Chen, Haiji Huang. A Novel Reconfigurable Assembly Jig Based on Stable Agile Joints and Adaptive Positioning-Clamping Bolts. 6th CIRP Conference on Assembly Technologies and Systems (CATS). Procedia CIRP 44 (2016): 316 –321。 lZhu Xusheng, Zheng Lianyu, Tang Xiaojun. Configuration optimization of laser tracker stations for large-scale components in non-uniform temperature field using Monte-Carlo method[C]. 9th CIRP International Conference on Digital Enterprise Technology - DET 2016 – “Intelligent Manufacturing in the Knowledge Economy Era. Nanjing, China, 2016. Procedia CIRP, 2016, 56:261-266 l孟爽,郑联语,王艺玮等。基于几何约束的可重构装配型架修复性装调. 航空学报,2025 l王佐旭,王鑫,郑联语等。知识-用户行为驱动的飞机工装设计知识推送方法[J/OL].航空学报,2024 l张宏博,郑联语,王艺玮. 基于模块服役状态的盒式连接可重构型架稳定性评估方法. 航空学报,2021,42(9)。 l李树飞,郑联语,刘新玉,王天睿.AR 眼镜辅助的线缆连接器装配状态智能检错方法.计算机集成制造系统,2021, 27(10)。 l王亚辉,郑联语,樊伟。云架构下基于标准语义模型和复杂事件处理的制造车间数据采集与融合.计算机集成制造系统,2019。 l张宏博,郑联语,刘新玉,李树飞。基于信息物理系统的可重构装配型架智能装调技术.计算机集成制造系统,2019。 l赵雄,樊伟, 郑联语等, 基于优化STD法的大飞机垂尾装配界面精加工过程模态参数识别.航空学报, 2019, 40(9)。 l樊伟, 郑联语, 赵雄等. 基于新型电涡流阻尼器的大飞机垂尾装配界面精加工振动抑制. 航空学报, 2019, 40(9): 422859 l秦兆君,郑联语,张宏博,徐嘉兴.可重构柔性型架的智能装调与监测系统开发及应用.航空制造技术,2018. l樊伟,郑联语,王亚辉. 管路组件可重构装配工装系统的定位器自动配置与性能分析. 航空学报, 2018, 39(5): 42198. l樊伟,郑联语,王亚辉. 面向管路组件装配的自动化可重构柔性工装系统. 计算机集成制造系统, 2018,24(11). l陈锡伟,郑联语,张宏博。 关联设计技术在翼面类部件可重构装配型架设计中的应用研究。航空制造技术,2017年第11期:46-51。 l曹逸凡,郑联语,张宏博。智能眼睛辅助的激光跟踪仪移动测量系统。航空制造技术,2017第20期:60-66. l雷沛,郑联语.面向飞机大部件调姿的PPPS机构球铰点中心位置闭环标定方法.航空学报,2016,37(10):3186-3196 l大尺寸测量技术在航空制造中的应用及关键技术. 航空制造技术,2013 (07):30-33 l基于关键装配特性的大型零部件最佳位姿多目标优化算法. 航空学报. 2012(09):171-181 l基于STEP-NC的闭环加工系统研究与实现. 计算机集成制造系统,2011,17(11):2389-2398 l产品族工装配置技术研究与实现. 计算机集成制造系统,2011,17(3):585-594 lKey characteristics management in product lifecycle management: A survey of methodologies and practices. Proceedings of the Institution of Mechanical Engineers Part B:Journal of Engineering Manufacture,2008,222(B8):989-1008. lSystematic modeling and reusing of process knowledge for rapid process configuration. Robotics and Computer Integrated Manufacturing,2008,24(6):763-772. l薄壁零件数控加工工艺质量改进方法. 航空学报,2001,22(5):425-42
软件著作权: [1] 工艺失效分析知识库系统V1.0(PFMEA)。软件著作权号:2005SRBJ0305 [2] 制造元数据注册系统V1.0。软件著作权号:2006SRBJ0907 [3] 可视化工艺设计系统V1.0(VISPP)。软件著作权号:2008SRBJ0882 [4] 产品族工装资源快速配置与管理系统V1.0(RTCMS)。软件著作权号:2010SRBJ0098 [5] 集成大尺寸测量软件系统(ILVMS)。软件著作权号:2012SR015505 [6] 盒式连接可重构柔性工装设计软件。软件著作权号:2013SR059108 [7] 汽车白车身焊装生产线工艺及夹具设计软件。软件著作权号:2014SR181801 [8] 盒式连接可重构型架智能装调与监控软件。软件著作权号:12018R11L112366 [9] 设备互联与数据处理软件。软件著作权号:2019SR0529723 [10]飞机线缆支架装配状态视觉检测软件.软件著作权号:2019SR1402243 [11]旋转机械设备边云结合运维数字孪生系统. 软件著作权号:2020SR0731607 [12]可穿戴设备辅助的大型空间展开机构协同装调系统V1.0软件著作权号:2021SR1856656 [13]大型细长筒段对接过程可视化监测软件V1.0 软件著作权号:2023SR0102613 [14]大型细长筒类构件位姿原位视觉测量软件V1.0 软件著作权号:2023SR0102612 [15]机外预调工作站管控软件 V1.0 软件著作权号:2023SR0694473 [16]薄壁件自适应加工软件 V1.0 软件著作权号:2023SR0630221 [17]舱段对接过程多源异构数据感知与融合软件V1.0. 登记号: 2023SR0762027. [18]多机协同加工单元智能管控软件V1.0. 登记号: 2023SR0762026.
发明专利: [1] 一种管路整体装焊的可重构工装. 专利号:ZL 2011 1 0279402.6 [2] 一种管路装焊可重构工装自动配置方法及系统. 专利号:ZL 2011 1 0444781.X [3] 一种基于测量数据的管路性装焊机器人位姿计算方法.专利号:ZL 2014 1 07377530 [4] 一种管路柔性装焊的导管余量切割位置计算方法.专利号:ZL 2014 1 07303895 [5] 一种基于球干涉的汽车白车身焊点自动划分方法. 专利号:ZL 2014 1 07302680 [6]一种自锁式气电驱动辅助支撑装置。专利号 ZL201510153834.0 [7]一种夹紧力可监控的定行程凸轮夹紧装置。专利号 ZL201520195411.0 (实用新型) [8] 飞机大部件装配界面精加工坐标测量控制网的建立方法. 专利号ZL 2015 1 0641527.7 [9] 一种通过智能眼镜移动控制激光跟踪仪的方法及系统. 专利号 ZL 2016 1 0610104.3 [10] 基于移动端-服务器架构的移动控制激光跟踪仪的系统. 专利号 ZL 2016 1 0610428.7 [11] 一种基于最小二乘法的飞机装配型架骨架优化布局方法. 专利号 ZL 201711032624.1 [12] 一种基于单目视觉的航空导线编号识别的图像采集装置. 专利号 ZL 201810945551.3 [13]一种基于深度学习与多目标分布排序的航空插头孔位识别方法. ZL 201910264451.9 [14]一种基于视觉的飞机线缆支架装配状态检测方法. 专利号:ZL 2019 1 0434969.2 [15] 基于可穿戴设备、场景与数模配准的装配状态感知方法. 专利号:ZL202111122117.3 [16] 基于协作机器人和可穿戴设备的微重力装配系统及方法. 专利号:ZL201810945551.3 [17]一种基于深度学习和双目立体视觉的飞机线缆支架识别与参数获取方法. 专利号:ZL2019104349777 [18]一种具有自动导引功能的并联智能机器人及其导引方法. ZL2019112524369 [19]一种基于FPGA的产品智能装配生产线监控系统及方法. ZL2019112519604 [20]基于强化学习的旋转机械诊断网络自动搜索方法. ZL202110234810.3 [21]基于对抗训练和迁移学习的旋转机械剩余寿命预测混合收缩方法. ZL202110234849.5 [22]面向旋转机械故障诊断的分层多叉网络结构高效搜索方法. ZL202110253852.1 [22]一种304不锈钢低温盐浴渗铬方法. ZL202111251551.1 [24]一种基于双目视觉测量和先验检测数据的大型细长筒类构件位姿原位测量方法. ZL202111224890.0 [25]一种基于定长记忆窗增量学习的工业机器人误差补偿方法. ZL202210637360.7 [26]大型筒件局部特征机器人扫描测量路径调整方法. ZL202310577100.X [27]一种面向多品种大型薄壁件的新型寻位加工系统及方法. ZL202210911709.1 [28]一种基于复合分支神经网络的工业机器人定位误差自适应补偿方法. ZL202211368818.X [39]一种壁板预装配可重构柔性型架. ZL202310084545.4 [30]一种基于图卷积策略梯度的多机协同任务调度方法. ZL202310607252.X [31]一种基于点云数据的大长径比筒件装配界面快速余量计算方法. 申请号:CN202310936808.X [32]数据机理混合驱动的机器人铣削稳定性建模方法. 申请号:CN2023112501132 [33]基于直线导轨式调姿机构和视觉测量辅助的细长筒段装配自动化控制方法: 申请号:CN118682459A[P]
|
