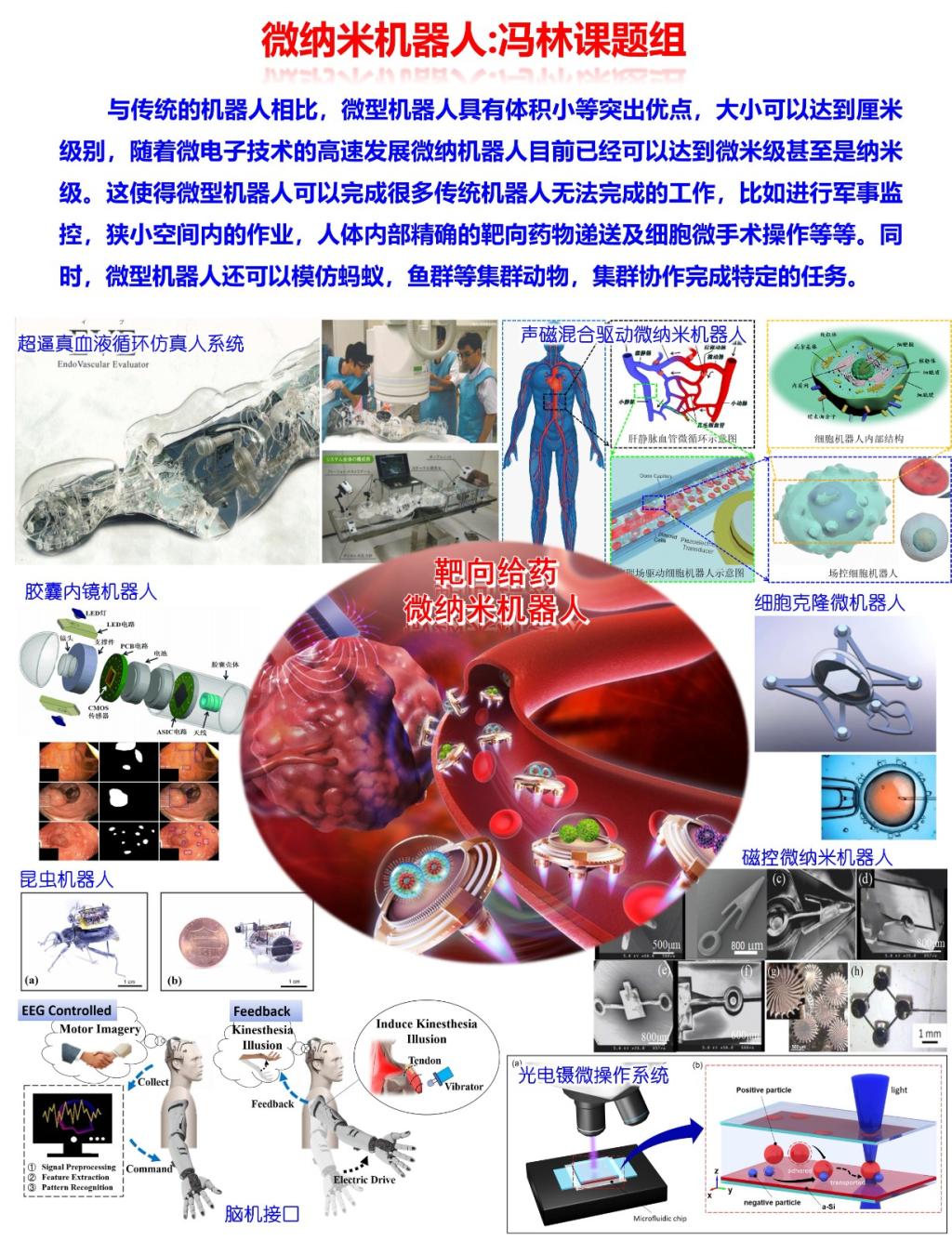
冯林,教育部国家级领军人才青年项目获得者、北京市杰出青年、北京市科技新星、JSPS学者、GCOE学者、高被引学者、主要研究方向为微纳操作和微纳米机器人。获得国家重点研发计划,智能机器人专项“靶向药物输送场控微纳米机器人精准化技术与医用基础研究”项目,以及国家重点研发计划“颠覆式技术”,“基于高敏感性光电薄膜的光电镊单细胞无损自动化筛选设备”项目等国家级省部级项目20多项。获得机器人领域顶级会议IEEE ICRA在内的最佳论文奖等10项。带领学生获得全国大学生“互联网+”大赛金奖全国第二、首都挑战杯特等奖、冯如杯一等奖20多项。发表学术论文140篇,封面文章10篇。出版《微纳米机器人概论》教材一部、英文专著4部。研究主要集中在场控微纳载药机器人,建立靶向药物输送微纳机器人一体化制造与多场驱动技术体系,为新一代微纳米机器人制备及控制提供理论及方法支持。细胞生物学、生物制造以及再生医疗等领域中,细胞组织级的精密操作显得极为重要,比如克隆、体外受精、人工诱导多能干细胞生长成型等。传统的细胞操纵方法大多采用体积庞大的微操作机械臂,其精度低、可重复性低、价格昂贵、效率低下。因此为了解决这一几十年不变的陈旧技术,我们设计开发出了新型磁控微型机器人,应用于单细胞操作。其具有精度高、控制简单、可重复性高等优势。该微型机器人由磁性材料加工而成,封装于微流控芯片中,通过利用外界磁场的自动化控制,可以有效避免外界环境对细胞的侵染,并极大的提高了操作控制精度。 ___·主持项目与课题·__________________________________________________________ 主持或参加的主要科研项目(按时间顺序倒排) 1. 国家重点研发计划“首批颠覆式技术”,“基于高敏感性光电薄膜的光电镊单细胞无损自动化筛选设备”2022年-2024年,500万,项目主持; 2. 国家重点研发计划,“靶向药物输送场控微纳机器人基础研究”2020年,453万,课题一主持 3. 教育部国家级领军人才青年项目“医用微纳米机器人与微纳操作”; 4. 北京市杰出青年基金“靶向给药微纳米机器人系统”100万 项目主持; 5. 北京市科技新星项目 靶向给药场控微纳米机器人技术 2019.11-2021.11,50万,主持; 6. 胶囊机器人系统研究,2019年-2023年,横向课题,50万; 7. 光电操作设备中核心光电薄膜的研制,2020年-2021年,横向课题,100万; 8. 2019-nCoV快速诊断技术与互联网+AI预防控制体系, 子课题负责人 100万; 9. “JCJQ计划”重点基础研究项目(GF973计划),2019-JCJQ-ZD-120-00,基于植入式芯片与光电**脊髓功能重塑技术研究,2019-12至2022-12,1200万在研,参与; 10. 北京市自然基金针对细胞级微纳米机器人系统研究,2017.10-2020.6 28万; 11. 科技委仿生悬停平台器件研究及演示验证,2017.7-2018.6 750万; 12. 科技委仿生智能变色光子晶体纳驱动,2017.8-2019.7 100万; 13. 青年拔尖人才计划,2018-2021,100万; 14. 卓越百人,2016.10-2017.12,50万; 15. 仿生多级结构多场效应创新团队,2017.8-2018.7 ,100万 ; 16. 基础研究文部科学省Challenge of On-chip Precise Enucleation of Oocyte Using 3D 6DOF Manipulation 2013.4-2015.3 4,030,000日元; 17. 基础研究文部科学省 Autonomous induction monitoring and cell measurement by ultra-high-speed operation 2013.4-2014.3 122,720,000日元; 18. Nagoya Univ. GCOE High Speed Enucleation of Oocyte Using Magnetically Actuated Microrobot on a Chip 2013.4-2014.3,1,000,000日元; 19. 日本科技振兴会 Automatic oocyte enucleation manipulation 2011.4-2013.3 2,000,000日元; 20. 日本基础研究文部科学省 Evaluation and dynamic measurement of biomembrane transporter using on-chip 2008.4-2010.3 49,790,000日元; ___·学术期刊·_______________________________________________________________ [109] Zhang, Liwen, Song Zhao, Xinzhao Zhou, Xueshan Jing, Yu Zhou, Yan Wang, Yantong Zhu et al. "A Magnetic-Driven Multi-Motion Robot with Position/Orientation Sensing Capability." Research. [108] Gao, Chao, De Gong, Xue Deng, Lin Feng, and Wenqiang Zhang. "Vision-based method for precise manipulation of magnetic spiral microrobots." In 2022 IEEE International Conference on Cyborg and Bionic Systems (CBS), pp. 92-96. IEEE, 2023. [107] Wang, Luyao, Han Gao, Hongyan Sun, Yiming Ji, Li Song, Lina Jia, Chutian Wang et al. "Reconfigurable Vortex-like Paramagnetic Nanoparticle Swarm with Upstream Motility and High Body-length Ratio Velocity." Research 6 (2023): 0088. [106] Hou, Yaxin, Yuguo Dai, Wei Zhang, Minghui Wang, Hanxue Zhao, and Lin Feng. "Ultrasound-Based Real-Time Imaging of Hydrogel-Based Millirobots with Volume Change Capability." Micromachines 14, no. 2 (2023): 422. [105] Gan, Chunyuan, Jiaying Zhang, Jiawei Zhao, Shuzhang Liang, Yiming Ji, and Lin Feng. "Cell Focusing and Rotation by a Planar Optoelectronic Tweezers." In 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), pp. 1-5. IEEE, 2022. [104] Ji, Yiming, Xue Bai, Hongyan Sun, Luyao Wang, Junjie Xu, Chunyuan Gan, Yuguo Dai, Hui Hui, and Lin Feng. "Biocompatible Ferrofluid Robot With Photothermal Property for Targeted Tumor Therapy." IEEE Robotics and Automation Letters 7, no. 4 (2022): 11517-11522. [103] Xu, Minghao, Shuzhang Liang, Wenqiang Zhang, Lin Feng, Kehan Chen, Xue Deng, Deyuan Zhang, and Jun Cai. "Biomimetic color‐changing skin based on temperature‐responsive hydrogel microspheres with the photonic crystal structure." Journal of Polymer Science 61, no. 1 (2023): 100-107. [102] Tang, Tan, Peipei Zhang, Yanran Wei, Hongxing Jia, Lin Feng, and Ye Xu. "High-efficiency 3D cell spheroid formation via the inertial focusing effect in rotating droplets." Bio-Design and Manufacturing 6, no. 1 (2023): 90-97. [101] Wang, Luyao, Youyuan Shi, Jingzhen Jiang, Chan Li, Hengrui Zhang, Xinhui Zhang, Tao Jiang, Liang Wang, Yinyan Wang, and Lin Feng. "Micro‐Nanocarriers Based Drug Delivery Technology for Blood‐Brain Barrier Crossing and Brain Tumor Targeting Therapy." Small 18, no. 45 (2022): 2203678. [100] Zhao, Jiawei, Chunyuan Gan, Jiaying Zhang, Shuzhang Liang, Jiapeng Yang, and Lin Feng. "Deep Learning Assisted Automated Separation Platform of Single Cells and Microparticles Using Optoelectronic Tweezers." In 2022 WRC Symposium on Advanced Robotics and Automation (WRC SARA), pp. 275-279. IEEE, 2022. [99] Yang, Jiapeng, Junyi Wei, Fengwu Wang, Li Song, Jiawei Zhao, and Lin Feng. "A Localization Method for the Magnetic Levitation Capsule Robot." In 2022 WRC Symposium on Advanced Robotics and Automation (WRC SARA), pp. 152-159. IEEE, 2022. [98] Ji, Yiming, Junjie Xu, Luyao Wang, Wei Zhang, and Lin Feng. "Magnetic Manipulation of a Magnetotactic Bacteria-based Biomicrorobot." In 2022 WRC Symposium on Advanced Robotics and Automation (WRC SARA), pp. 185-188. IEEE, 2022. [97], Xu, J., Ma, S., Zhang, W., Jia, L., Zheng, H., Bo, P., Bai, X., Sun, H., Qi, L., Zhang, T., Chen, C., Li, F., Arai, F., Tian, J., Feng, L., In, vitro, magnetosome, remineralization, for, silver-magnetite, hybrid, magnetosome, biosynthesis, and, used, for, healing, of, the, infected, wound, 2022, Journal, of, Nanobiotechnology, 20, 1, 364, 10.1186/s12951-022-01532-4, Article [96], Ji, Y., Bai, X., Sun, H., Wang, L., Xu, J., Gan, C., Dai, Y., Hui, H., Feng, L., Biocompatible, Ferrofluid, Robot, With, Photothermal, Property, for, Targeted, Tumor, Therapy, 2022, IEEE, Robotics, and, Automation, Letters, 7, 4, 11517, 11522, 10.1109/LRA.2022.3201696, Article [95], Xu, J., Ma, S., Zheng, H., Pang, B., Li, S., Li, F., Feng, L., Tian, J., Biomanufacturing, Biotinylated, Magnetic, Nanomaterial, via, Construction, and, Fermentation, of, Genetically, Engineered, Magnetotactic, Bacteria, 2022, Bioengineering, 9, 8, 356, 10.3390/bioengineering9080356, Article [94], Dai, Y., Jia, L., Wang, L., Sun, H., Ji, Y., Wang, C., Song, L., Liang, S., Chen, D., Feng, Y., Bai, X., Zhang, D., Arai, F., Chen, H., Feng, L., Magnetically, Actuated, Cell-Robot, System:, Precise, Control, Manipulation, and, Multimode, Conversion, 2022, Small, 18, 15, 2105414, 2, 10.1002/smll.202105414, Article [93], Wang, L., Song, L., Sun, H., Ji, Y., Dai, Y., Feng, L., Multi-Mode, Motion, Control, of, Reconfigurable, Vortex-Shaped, Microrobot, Swarms, for, Targeted, Tumor, Therapy, 2022, IEEE, Robotics, and, Automation, Letters, 7, 2, 3578, 3583, 1, 10.1109/LRA.2022.3146522, Article [92], Liang, S., Sun, J., Zhang, C., Zhu, Z., Dai, Y., Gan, C., Cai, J., Chen, H., Feng, L., Parallel, Manipulation, and, Flexible, Assembly, of, Micro-Spiral, via, Optoelectronic, Tweezers, 2022, Frontiers, in, Bioengineering, and, Biotechnology, 10, 868821, 1, 10.3389/fbioe.2022.868821, Article [91], Zhang, P., Rasheed, M., Liang, J., Wang, C., Feng, L., Chen, Z., Emerging, Potential, of, Exosomal, Non-coding, RNA, in, Parkinson’s, Disease:, A, Review, 2022, Frontiers, in, Aging, Neuroscience, 14, 819836, 3, 10.3389/fnagi.2022.819836, Review [90], Zhang, C., Liang, S., Cao, Y., Sun, H., Feng, L., Reducing, the, Guidewire, Friction, for, Endovascular, Interventional, Surgery, by, Radial, Micro-Vibration, 2022, IEEE, Transactions, on, Ultrasonics, Ferroelectrics, and, Frequency, Control, 69, 3, 1020, 1031, 10.1109/TUFFC.2022.3142763, Article [89], Ji, Y., Gan, C., Dai, Y., Bai, X., Zhu, Z., Song, L., Wang, L., Chen, H., Zhong, J., Feng, L., Deformable, ferrofluid, microrobot, with, omnidirectional, self-adaptive, mobility, 2022, Journal, of, Applied, Physics, 131, 6, 64701, 2, 10.1063/5.0076653, Article [88], Wang, L., Shi, Y., Jiang, J., Li, C., Zhang, H., Zhang, X., Jiang, T., Wang, L., Wang, Y., Feng, L., Micro-Nanocarriers, Based, Drug, Delivery, Technology, for, Blood-Brain, Barrier, Crossing, and, Brain, Tumor, Targeting, Therapy, 2022, Small, 10.1002/smll.202203678, Review [87], Xu, M., Liang, S., Zhang, W., Feng, L., Chen, K., Deng, X., Zhang, D., Cai, J., Biomimetic, color-changing, skin, based, on, temperature-responsive, hydrogel, microspheres, with, the, photonic, crystal, structure, 2022, Journal, of, Polymer, Science, 10.1002/pol.20220411, Article [86], Bai, X., Zhang, W., Dai, Y., Wang, Y., Sun, H., Feng, L., Acoustic, and, magnetic, hybrid, actuated, immune, cell, robot, for, target, and, kill, cancer, cells, 2022, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 7936, 7941, 10.1109/ICRA46639.2022.9812071, Conference, Paper [85], Zhang, W., Song, B., Bai, X., Jia, L., Song, L., Guo, J., Feng, L., Versatile, acoustic, manipulation, of, micro-objects, using, mode-switchable, oscillating, bubbles:, Transportation, trapping, rotation, and, revolution, 2021, Lab, on, a, Chip, 21, 24, 4760, 4771, 4, 10.1039/d1lc00628b, Article [84], Liang, S., Gan, C., Dai, Y., Zhang, C., Bai, X., Zhang, S., Wheeler, A.R., Chen, H., Feng, L., Interaction, between, positive, and, negative, dielectric, microparticles/microorganism, in, optoelectronic, tweezers, 2021, Lab, on, a, Chip, 21, 22, 4379, 4389, 3, 10.1039/d1lc00610j, Article [83], Zhang, D., Jiang, Y., Feng, L., Chen, H., Cai, J., Zhang, X., Micro-, and, Nano-Bionic, Surfaces:, Biomimetics, Interface, Energy, Field, Effects, and, Applications, 2021, Micro-, and, Nano-Bionic, Surfaces:, Biomimetics, Interface, Energy, Field, Effects, and, Applications, 1, 350, 10.1016/B978-0-12-824502-6, Book [82], Jia, L., Zhang, P., Sun, H., Dai, Y., Liang, S., Bai, X., Feng, L., Optimization, of, nanoparticles, for, smart, drug, delivery:, A, review, 2021, Nanomaterials, 11, 11, 2790, 1, 10.3390/nano11112790, Review [81], Bai, X., Chen, D., Dai, Y., Liang, S., song, B., Guo, J., Dai, B., Zhang, D., Feng, L., Bone, formation, recovery, with, gold, nanoparticle-induced, M2, macrophage, polarization, in, mice, 2021, Nanomedicine:, Nanotechnology, Biology, and, Medicine, 38, 102457, 10.1016/j.nano.2021.102457, Article [80], Dai, Y., Bai, X., Jia, L., Sun, H., Feng, Y., Wang, L., Zhang, C., Chen, Y., Ji, Y., Zhang, D., Chen, H., Feng, L., Precise, Control, of, Customized, Macrophage, Cell, Robot, for, Targeted, Therapy, of, Solid, Tumors, with, Minimal, Invasion, 2021, Small, 17, 41, 2103986, 13, 10.1002/smll.202103986, Article [79], Bai, X., Song, B., Chen, Z., Zhang, W., Chen, D., Dai, Y., Liang, S., Zhang, D., Zhao, Z., Feng, L., Postoperative, evaluation, of, tumours, based, on, label-free, acoustic, separation, of, circulating, tumour, cells, by, microstreaming, 2021, Lab, on, a, Chip, 21, 14, 2721, 2729, 6, 10.1039/d1lc00165e, Article [78], Zhou, X., Zhang, D., Huang, Z., Song, X., Liu, H., Feng, L., Liftoff, of, a, New, Hovering, Oscillating-wing, Micro, Aerial, Vehicle, 2021, Journal, of, Bionic, Engineering, 18, 3, 649, 661, 10.1007/s42235-021-0043-x, Article [77], Chen, D., Yang, Z., Ji, Y., Dai, Y., Feng, L., Arai, F., Deformable, ferrofluid-based, millirobot, with, high, motion, accuracy, and, high, output, force, 2021, Applied, Physics, Letters, 118, 13, 134101, 9, 10.1063/5.0042893, Article [76], Chen, Y., Pan, Y., Feng, Y., Li, D., Man, J., Feng, L., Zhang, D., Chen, H., Chen, H., Role, of, glucose, in, the, repair, of, cell, membrane, damage, during, squeeze, distortion, of, erythrocytes, in, microfluidic, capillaries, 2021, Lab, on, a, Chip, 21, 5, 896, 903, 10.1039/d0lc00411a, Article [75], Liang, S., Cao, Y., Dai, Y., Wang, F., Bai, X., Song, B., Zhang, C., Gan, C., Arai, F., Feng, L., A, versatile, optoelectronic, tweezer, system, for, micro-objects, manipulation:, Transportation, patterning, sorting, rotating, and, storage, 2021, Micromachines, 12, 3, 271, 1, 16, 7, 10.3390/mi12030271, Article [74], Chen, Y., Li, Z., Bai, X., Feng, Y., Feng, L., Zhang, D., Chen, H., Chen, H., Reduction, of, Erythrocyte, Fluid, Adaptability, Due, to, Cell, Membrane, Hardening, Based, on, Single-Cell, Analysis, 2021, Biochip, Journal, 15, 1, 90, 99, 10.1007/s13206-021-00005-4, Article [73], Feng, L., Bai, X., Jia, L., Zhang, C., Chen, Y., Chen, H., Field-controlled, micro-nano, manipulations, and, micro-nano, robots, 2021, Micro, and, Nano, Systems, for, Biophysical, Studies, of, Cells, and, Small, Organisms, 201, 225, 10.1016/B978-0-12-823990-2.00009-X, Book, Chapter [72], Zhang, W., Song, B., Bai, X., Guo, J., Feng, L., Arai, F., A, portable, acoustofluidic, device, for, multifunctional, cell, manipulation, and, reconstruction, 2021, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 2021-May, 664, 669, 1, 10.1109/ICRA48506.2021.9560812, Conference, Paper [71], Wang, L., Dai, Y., Sun, H., Song, L., Jia, L., Jiang, C., Arai, F., Feng, L., Precise, Control, of, Magnetized, Macrophage, Cell, Robot, for, Targeted, Drug, Delivery, 2021, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 7464, 7469, 10.1109/IROS51168.2021.9635945, Conference, Paper [70], Cao, Y., Liang, S., Chen, H., Gan, C., Song, L., Zhang, C., Arai, F., Feng, L., A, Portable, Remote, Optoelectronic, Tweezer, System, for, Microobjects, Manipulation, 2021, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 8557, 8562, 1, 10.1109/IROS51168.2021.9636265, Conference, Paper [69], Zhang, C., Cao, Y., Liang, S., Feng, L., Micro, vibrations-based, Friction, Reduction, Evaluation, of, Guide, Wire, for, Endovascular, Interventional, Application, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 147, 152, 10.1109/WRCSARA53879.2021.9612693, Conference, Paper [68], Wang, W., Zhan, G., Wei, J., Song, L., Feng, L., WCE, with, real, time, polyp, detection, and, segmentation, using, deep, neural, networks, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 140, 146, 10.1109/WRCSARA53879.2021.9612694, Conference, Paper [67], Wang, L., Song, L., Jia, L., Sun, H., Ji, Y., Dai, Y., Feng, L., Precise, Control, of, Magnetic, Nano, Particle, Formed, Microrobot, Cluster, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 13, 17, 10.1109/WRCSARA53879.2021.9612685, Conference, Paper [66], Ullah, Z., Dixiao, C., Tovmachenko, O., Feng, L., Electromagnetic, Actuation, Based, Swimming, Robot, with, Semi-Flexible, Fins, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 18, 23, 10.1109/WRCSARA53879.2021.9612684, Conference, Paper [65], Gan, C., Liang, S., Wang, F., Cao, Y., Ji, Y., Lina, J., Song, L., Feng, L., Non-contact, Massively, Parallel, Manipulation, of, Micro-objects, by, Optoelectronic, Tweezers, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 7, 12, 1, 10.1109/WRCSARA53879.2021.9612697, Conference, Paper [64], Ji, Y., Dai, Y., Chen, D., Gan, C., Wang, L., Feng, L., Precise, control, of, ferrofluid, droplet, robot, in, 3-D, vascular, model, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 122, 127, 10.1109/WRCSARA53879.2021.9612669, Conference, Paper [63], Wei, J., Song, L., Wang, X., Zhao, J., Feng, L., 5, DOF, Capsule, Endoscopy, with, Wi-Fi, based, Video, Transmission, Module, 2021, 2021, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2021, 134, 139, 10.1109/WRCSARA53879.2021.9612621, Conference, Paper [62], Bai, X., Bin, S., Yuguo, D., Wei, Z., Yanmin, F., Yuanyuan, C., Deyuan, Z., Fumihito, A., Lin, F., Parallel, trapping, patterning, separating, and, rotating, of, micro-objects, with, various, sizes, and, shapes, using, acoustic, microstreaming, 2020, Sensors, and, Actuators, A:, Physical, 315, 112340, 3, 10.1016/j.sna.2020.112340, Article [61], Feng, Y., Feng, L., Dai, Y., Bai, X., Zhang, C., Chen, Y., Arai, F., A, novel, and, controllable, cell-based, microrobot, in, real, vascular, network, for, target, tumor, therapy, 2020, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 9341774, 2828, 2833, 1, 10.1109/IROS45743.2020.9341774, Conference, Paper [60], Bai, X., Song, B., Chen, D., Dai, Y., Feng, L., Arai, F., Anticipating, tumor, metastasis, by, circulating, tumor, cells, captured, by, acoustic, microstreaming, 2020, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 9341011, 3091, 3096, 10.1109/IROS45743.2020.9341011, Conference, Paper [59], Song, B., Zhang, W., Bai, X., Feng, L., Zhang, D., Arai, F., A, novel, portable, cell, sonoporation, device, based, on, open-source, acoustofluidics, 2020, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 9341603, 2786, 2791, 1, 10.1109/IROS45743.2020.9341603, Conference, Paper [58], Dai, Y., Feng, Y., Feng, L., Chen, Y., Bai, X., Liang, S., Song, L., Arai, F., Magnetized, cell-robot, propelled, by, magnetic, field, for, cancer, killing, 2020, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 9341167, 2834, 2839, 2, 10.1109/IROS45743.2020.9341167, Conference, Paper [57], Bai, X., Wang, Y., Song, Z., Feng, Y., Chen, Y., Zhang, D., Feng, L., The, basic, properties, of, gold, nanoparticles, and, their, applications, in, tumor, diagnosis, and, treatment, 2020, International, Journal, of, Molecular, Sciences, 21, 7, 2480, 98, 10.3390/ijms21072480, Review [56], Bai, X., Chen, D., Zhang, W., Ossian, H., Chen, Y., Feng, Y., Feng, L., Arai, F., Magnetically, driven, bionic, millirobots, with, a, low-delay, automated, actuation, system, for, bioparticles, manipulation, 2020, Micromachines, 11, 2, 3, 10.3390/mi11020231, Article [55], Li, Z., Zhang, D., Wang, D., Zhang, L., Feng, L., Zhang, X., A, Bioinspired, Flexible, Film, Fabricated, by, Surface-Tension-Assisted, Replica, Molding, for, Dynamic, Control, of, Unidirectional, Liquid, Spreading, 2019, ACS, Applied, Materials, and, Interfaces, 11, 51, 48505, 48511, 4, 10.1021/acsami.9b15385, Article [54], Chen, D., Zhang, W., Dai, Y., Feng, Y., Chen, Y., Bai, X., Feng, L., 4, DOF, High-speed, Cell, Manipulation, Magnetic-tweezers, and, the, Operating, System, Driven, by, Piezo, Ceramics, 2019, MHS, 2019, -, 30th, 2019, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, 9249294, 10.1109/MHS48134.2019.9249294, Conference, Paper [53], Dai, Y., Chen, Y., Feng, Y., Chen, D., Bai, X., Feng, L., Magnetized, Cell-robot, Propelled, by, Regular, Tetrahedron, Magnetic, Actuation, System, 2019, MHS, 2019, -, 30th, 2019, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, 9249288, 1, 10.1109/MHS48134.2019.9249288, Conference, Paper [52], Dai, Y., Chen, D., Liang, S., Song, L., Qi, Q., Feng, L., A, magnetically, actuated, octopus-like, robot, capable, of, moving, in, 3D, space, 2019, IEEE, International, Conference, on, Robotics, and, Biomimetics, ROBIO, 2019, 8961461, 2201, 2206, 5, 10.1109/ROBIO49542.2019.8961461, Conference, Paper [51], Song, B., Feng, Y., Zhou, Q., Feng, L., On-Chip, Three-dimension, Cell, Rotation, Using, Whirling, Flows, Generated, by, Oscillating, Asymmetrical, Microstructures, 2019, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 8967620, 678, 683, 10.1109/IROS40897.2019.8967620, Conference, Paper [50], Feng, L., Song, B., Chen, Y., Liang, S., Dai, Y., Zhou, Q., Chen, D., Bai, X., Feng, Y., Jiang, Y., Zhang, D., Arai, F., On-chip, rotational, manipulation, of, microbeads, and, oocytes, using, acoustic, microstreaming, generated, by, oscillating, asymmetrical, microstructures, 2019, Biomicrofluidics, 13, 6, 64103, 16, 10.1063/1.5121809, Article [49], Hu, H., Yang, X., Song, L., Wei, W., Peng, G., Feng, L., High, Position, Accuracy, and, 5, Degree, Freedom, Magnetic, Driven, Capsule, Robot, 2019, WRC, SARA, 2019, -, World, Robot, Conference, Symposium, on, Advanced, Robotics, and, Automation, 2019, 8931946, 19, 24, 10.1109/WRC-SARA.2019.8931946, Conference, Paper [48], Tovmachenko, O., Feng, L., Mousa, A.M., Ullah, Z., Masoud, M.A., A, capsule-type, device, for, soft, tissue, cutting, using, a, threadless, ballscrew, actuator, 2019, Proceedings, of, MARSS, 2019:, 4th, International, Conference, on, Manipulation, Automation, and, Robotics, at, Small, Scales, 8860958, 1, 10.1109/MARSS.2019.8860958, Conference, Paper [47], Jiang, Y., Shen, D., Liu, M., Ma, Z., Zhao, P., Feng, L., Zhang, D., Fabrication, of, graphene/polyimide, nanocomposite-based, hair-like, airflow, sensor, via, direct, inkjet, printing, and, electrical, breakdown, 2019, Smart, Materials, and, Structures, 28, 6, 65028, 13, 10.1088/1361-665X/ab18cb, Article [46], Feng, L., Chen, D., Zhou, Q., Song, B., Zhang, W., Cell, injection, microrobot, development, and, evaluation, in, microfluidic, chip, 2019, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 2019-May, 8793799, 4831, 4836, 10.1109/ICRA.2019.8793799, Conference, Paper [45], Yanmin, F., Dixiao, C., Yuguo, D., Yunayuan, C., De, G., Lin, F., The, design, and, control, of, magnetized, cell-based, microrobot, for, targeting, drug, delivery, 2019, Proceedings, of, the, 14th, Annual, IEEE, International, Conference, on, Nano/Micro, Engineered, and, Molecular, Systems, NEMS, 2019, 8915608, 273, 276, 1, 10.1109/NEMS.2019.8915608, Conference, Paper [44], Gong, D., Cai, J., Celi, N., Liu, C., Zhang, W., Feng, L., Zhang, D., Controlled, propulsion, of, wheel-shape, flaky, microswimmers, under, rotating, magnetic, fields, 2019, Applied, Physics, Letters, 114, 12, 123701, 9, 10.1063/1.5090297, Article [43], Hu, X., Yan, X., Gong, L., Wang, F., Xu, Y., Feng, L., Zhang, D., Jiang, Y., Improved, Piezoelectric, Sensing, Performance, of, P(VDF-TrFE), Nanofibers, by, Utilizing, BTO, Nanoparticles, and, Penetrated, Electrodes, 2019, ACS, Applied, Materials, and, Interfaces, 11, 7, 7379, 7386, 51, 10.1021/acsami.8b19824, Article [42], Wang, X., Cai, J., Sun, L., Zhang, S., Gong, D., Li, X., Yue, S., Feng, L., Zhang, D., Facile, Fabrication, of, Magnetic, Microrobots, Based, on, Spirulina, Templates, for, Targeted, Delivery, and, Synergistic, Chemo-Photothermal, Therapy, 2019, ACS, Applied, Materials, and, Interfaces, 11, 5, 4745, 4756, 56, 10.1021/acsami.8b15586, Article [41], Chen, Y., Feng, Y., Deveaux, J.G., Masoud, M.A., Chandra, F.S., Chen, H., Zhang, D., Feng, L., Biomineralization, forming, process, and, bio-inspired, nanomaterials, for, biomedical, application:, A, review, 2019, Minerals, 9, 2, 68, 54, 10.3390/min9020068, Review [40], Song, L., Yang, X., Hu, H., Peng, G., Wei, W., Dai, Y., Feng, L., The, design, of, 3-D, space, electromagnetic, control, system, for, high-precision, and, fast-response, control, of, capsule, robot, with, 5-DOF, 2019, Lecture, Notes, in, Computer, Science, (including, subseries, Lecture, Notes, in, Artificial, Intelligence, and, Lecture, Notes, in, Bioinformatics), 11745, LNAI, 202, 212, 2, 10.1007/978-3-030-27529-7_18, Conference, Paper [39], Jiang, Y., Ma, Z., Cao, B., Gong, L., Feng, L., Zhang, D., Development, of, a, Tactile, and, Slip, Sensor, with, a, Biomimetic, Structure-enhanced, Sensing, Mechanism, 2019, Journal, of, Bionic, Engineering, 16, 1, 47, 55, 17, 10.1007/s42235-019-0005-8, Article [38], Mousa, A., Feng, L., Dai, Y., Tovmachenko, O., Self-Driving, 3-legged, Crawling, Prototype, Capsule, Robot, with, Orientation, Controlled, by, External, Magnetic, Field, 2018, 2018, WRC, Symposium, on, Advanced, Robotics, and, Automation, WRC, SARA, 2018, -, Proceeding, 8584222, 243, 248, 7, 10.1109/WRC-SARA.2018.8584222, Conference, Paper [37], Gong, D., Cai, J., Celi, N., Feng, L., Jiang, Y., Zhang, D., Bio-inspired, magnetic, helical, microswimmers, made, of, nickel-plated, Spirulina, with, enhanced, propulsion, velocity, 2018, Journal, of, Magnetism, and, Magnetic, Materials, 468, 148, 154, 29, 10.1016/j.jmmm.2018.08.001, Article [36], Zhou, Q., Song, B., Feng, Y., Feng, L., Cell, injection, microrobot, development, and, evaluation, in, microfluidic, chip, 2018, MHS, 2018, -, 2018, 29th, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, 8886994, 10.1109/MHS.2018.8886994, Conference, Paper [35], Dai, Y., Feng, L., Mousa, A., Newly, established, three, dimensional, magnetically, controlling, system, 2018, MHS, 2018, -, 2018, 29th, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, 8886973, 10.1109/MHS.2018.8886973, Conference, Paper [34], Feng, L., Song, B., Zhang, D., Jiang, Y., Arai, F., On-chip, tunable, cell, rotation, using, acoustically, oscillating, asymmetrical, microstructures, 2018, Micromachines, 9, 11, 596, 18, 10.3390/mi9110596, Article [33], Feng, L., Zhou, Q., Song, B., Feng, Y., Cai, J., Jiang, Y., Zhang, D., Cell, injection, millirobot, development, and, evaluation, in, microfluidic, chip, 2018, Micromachines, 9, 11, 590, 9, 10.3390/mi9110590, Article [32], Jiang, Y., Liu, M., Yan, X., Ono, T., Feng, L., Cai, J., Zhang, D., Electrical, Breakdown-Induced, Tunable, Piezoresistivity, in, Graphene/Polyimide, Nanocomposites, for, Flexible, Force, Sensor, Applications, 2018, Advanced, Materials, Technologies, 3, 8, 1800113, 12, 10.1002/admt.201800113, Article [31], Yao, G., Feng, L., Zhang, D., Jiang, X., Morphology, and, Mechanical, Properties, of, Vibratory, Organs, in, the, Leaf-cutting, Ant, (Atta, cephalotes), 2018, Journal, of, Bionic, Engineering, 15, 4, 722, 730, 1, 10.1007/s42235-018-0060-6, Article [30], Jiang, Y., Wang, R., Feng, L., Li, J., An, Z., Zhang, D., Tunable, alumina, 2D, photonic-crystal, structures, via, biomineralization, of, peacock, tail, feathers, 2018, Optical, Materials, 78, 490, 494, 1, 10.1016/j.optmat.2018.03.007, Article [29], Jiang, Y., Gong, L., Hu, X., Zhao, Y., Chen, H., Feng, L., Zhang, D., Aligned, P(VDF-TrFE), nanofibers, for, enhanced, piezoelectric, directional, strain, sensing, 2018, Polymers, 10, 4, 364, 39, 10.3390/polym10040364, Article [28], Feng, L., Wu, X., Jiang, Y., Zhang, D., Arai, F., Manipulating, microrobots, using, balanced, magnetic, and, buoyancy, forces, 2018, Micromachines, 9, 2, 50, 11, 10.3390/mi9020050, Article [27], Jiang, Y., Wang, R., Feng, L., Zhang, D., Mechanochromic, response, of, the, barbules, in, peacock, tail, feather, 2018, Optical, Materials, 75, 74, 78, 10, 10.1016/j.optmat.2017.08.024, Article [26], Feng, L., Zhang, S., Jiang, Y., Zhang, D., Arai, F., Microrobot, with, passive, diamagnetic, levitation, for, microparticle, manipulations, 2017, Journal, of, Applied, Physics, 122, 24, 243901, 17, 10.1063/1.5005032, Article [25], Feng, L., Liang, S., Zhou, X., Yang, J., Jiang, Y., Zhang, D., Arai, F., On-chip, microfluid, induced, by, oscillation, of, microrobot, for, noncontact, cell, transportation, 2017, Applied, Physics, Letters, 111, 20, 203703, 23, 10.1063/1.5009545, Article [24], Feng, L., Di, P., Arai, F., High-precision, motion, of, magnetic, microrobot, with, ultrasonic, levitation, for, 3-D, rotation, of, single, oocyte, 2016, International, Journal, of, Robotics, Research, 35, 12, 1445, 1458, 62, 10.1177/0278364916631414, Article [23], Turan, B., Sakuma, S., Feng, L., Arai, F., Automation, of, an, on-chip, cell, mechanical, characterization, system, for, stiffness, evaluation, 2016, 2015, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, MHS, 2015, 7438327, 10.1109/MHS.2015.7438327, Conference, Paper [22], Feng, L., Turan, B., Ningga, U., Arai, F., Three, dimensional, rotation, of, bovine, oocyte, by, using, magnetically, driven, on-chip, robot, 2014, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 6943225, 4668, 4673, 9, 10.1109/IROS.2014.6943225, Conference, Paper [21], Feng, L., Hagiwara, M., Ichikawa, A., Arai, F., On-Chip, enucleation, of, bovine, oocytes, using, microrobot-assisted, flow-speed, control, 2013, Micromachines, 4, 2, 272, 285, 38, 10.3390/mi4020272, Article [20], Feng, L., Sun, Y., Ohsumi, C., Arai, F., Accurate, dispensing, system, for, single, oocytes, using, air, ejection, 2013, Biomicrofluidics, 7, 5, 54113, 22, 10.1063/1.4824394, Article [19], Feng, L., Hagiwara, M., Ichikawa, A., Sun, Y.L., Arai, F., High-speed, production, and, dispensing, of, enucleated, oocyte, by, microrobot, on, a, chip, 2012, 2012, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, MHS, 2012, 6492464, 111, 115, 10.1109/MHS.2012.6492464, Conference, Paper [18], Feng, L., Ichikawa, A., Arai, F., Hagiwara, M., Continuous, enucleation, of, bovine, oocyte, by, microrobot, with, local, flow, distribution, control, 2012, 2012, International, Conference, on, Manipulation, Manufacturing, and, Measurement, on, the, Nanoscale, 3M-NANO, 2012, -, Conference, Proceedings, 6472969, 59, 64, 4, 10.1109/3M-NANO.2012.6472969, Conference, Paper [17], Feng, L., Hagiwara, M., Ichikawa, A., Kawahara, T., Arai, F., Smooth, enucleation, of, bovine, oocyte, by, microrobot, with, local, flow, speed, control, in, microchannel, 2012, IEEE, International, Conference, on, Intelligent, Robots, and, Systems, 6386112, 944, 949, 6, 10.1109/IROS.2012.6386112, Conference, Paper [16], Feng, L., Hagiwara, M., Ichikawa, A., Arai, F., On-Chip, continuous, enucleation, by, hydraulic, force, control, using, magnetically, actuated, microrobot, 2012, Proceedings, of, the, 16th, International, Conference, on, Miniaturized, Systems, for, Chemistry, and, Life, Sciences, MicroTAS, 2012, 1270, 1272, Conference, Paper [15], Feng, L., Kawahara, T., Yamanishi, Y., Hagiwara, M., Kosuge, K., Arai, F., On-demand, and, size-controlled, production, of, droplets, by, magnetically, driven, microtool, 2012, Journal, of, Robotics, and, Mechatronics, 24, 1, 133, 140, 8, 10.20965/jrm.2012.p0133, Article [14], Hagiwara, M., Kawahara, T., Feng, L., Yamanishi, Y., Arai, F., On-chip, enucleation, of, oocyte, by, magnetically, driven, microtools, with, ultrasonic, vibration, 2011, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 5979930, 2680, 2685, 1, 10.1109/ICRA.2011.5979930, Conference, Paper [13], Hagiwara, M., Kawahara, T., Feng, L., Yamanishi, Y., Arai, F., High, performance, magnetically, driven, microtools, with, ultrasonic, vibration, for, biomedical, innovations, 2011, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 5980470, 3453, 3454, 6, 10.1109/ICRA.2011.5980470, Conference, Paper [12], Uvet, H., Feng, L., Ohashi, S., Hagiwara, M., Kawahara, T., Yamanishi, Y., Arai, F., On-chip, single, particle, loading, and, dispensing, 2011, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 5980449, 3151, 3156, 9, 10.1109/ICRA.2011.5980449, Conference, Paper [11], Feng, L., Hagiwara, M., Uvet, H., Yamanish, Y., Kawahara, T., Kosuge, K., Arai, F., High-speed, delivery, of, microbeads, in, microchannel, using, magnetically, driven, microtool, 2011, 2011, 16th, International, Solid-State, Sensors, Actuators, and, Microsystems, Conference, TRANSDUCERS'11, 5969431, 1312, 1315, 5, 10.1109/TRANSDUCERS.2011.5969431, Conference, Paper [10], Hagiwara, M., Kawahara, T., Yamanishi, Y., Masuda, T., Feng, L., Arai, F., On-chip, magnetically, actuated, robot, with, ultrasonic, vibration, for, single, cell, manipulations, 2011, Lab, on, a, Chip, 11, 12, 2049, 2054, 150, 10.1039/c1lc20164f, Article [9], Hagiwara, M., Kawahara, T., Feng, L., Yamanishi, Y., Arai, F., On-chip, dual-arm, microrobot, driven, by, permanent, magnets, for, high, speed, cell, enucleation, 2011, Proceedings, of, the, IEEE, International, Conference, on, Micro, Electro, Mechanical, Systems, (MEMS), 5734393, 189, 192, 9, 10.1109/MEMSYS.2011.5734393, Conference, Paper [8], Feng, L., Huseyin, U., Kawahara, T., Hagiwara, M., Yamanish, Y., Arai, F., On-chip, high-speed, and, on-demand, single, microbeads, loading, 2011, 2011, Int., Symp., on, Micro-NanoMechatronics, and, Human, Science, Symp., on, "COE, for, Education, and, Research, of, Micro-Nano, Mechatronics", Symposium, on, "Hyper, Bio, Assembler, for, 3D, Cellular, System, Innovation", 6102195, 291, 296, 10.1109/MHS.2011.6102195, Conference, Paper [7], Kawahara, T., Hirano, T., Feng, L., Uvet, H., Hagiwara, M., Yamanishi, Y., Arai, F., High-speed, single, cell, dispensing, system, 2011, 2011, Int., Symp., on, Micro-NanoMechatronics, and, Human, Science, Symp., on, "COE, for, Education, and, Research, of, Micro-Nano, Mechatronics", Symposium, on, "Hyper, Bio, Assembler, for, 3D, Cellular, System, Innovation", 6102235, 472, 474, 10.1109/MHS.2011.6102235, Conference, Paper [6], Hagiwara, M., Kawahara, T., Feng, L., Yamanish, Y., Arai, F., High, precision, magnetically, driven, microtools, with, ultrasonic, vibration, for, enucleation, of, oocytes, 2010, 2010, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science:, From, Micro, and, Nano, Scale, Systems, to, Robotics, and, Mechatronics, Systems, MHS, 2010, Micro-Nano, GCOE, 2010, Bio-Manipulation, 2010, 5669580, 47, 52, 1, 10.1109/MHS.2010.5669580, Conference, Paper [5], Yamanishi, Y., Feng, L., Arai, F., On-demand, production, of, emulsion, droplets, over, a, wide, range, of, sizes, 2010, Advanced, Robotics, 24, 14, 2005, 2018, 9, 10.1163/016918610X529084, Article [4], Yamanishi, Y., Feng, L., Arai, F., On-demand, and, size-controlled, production, of, emulsion, droplets, by, magnetically, driven, microtool, 2010, Proceedings, -, IEEE, International, Conference, on, Robotics, and, Automation, 5509589, 4094, 4099, 6, 10.1109/ROBOT.2010.5509589, Conference, Paper [3], Yamanishi, Y., Feng, L., Arai, F., On-demand, and, size-controlled, production, of, emulsion, droplet, in, microfludic, devices, 2010, Proceedings, of, the, IEEE, International, Conference, on, Micro, Electro, Mechanical, Systems, (MEMS), 5442399, 1087, 1090, 2, 10.1109/MEMSYS.2010.5442399, Conference, Paper [2], Yamanishi, Y., Feng, L., Kihara, Y., Sakuma, S., Arai, F., Formation, of, microdroplets, utilizing, hybrid, magnetically, driven, microtool, on, a, microfluidic, chip, 2009, 2009, IEEE, International, Conference, on, Robotics, and, Biomimetics, ROBIO, 2009, 5420616, 159, 164, 10.1109/ROBIO.2009.5420616, Conference, Paper [1], Feng, L., Yamanishi, Y., Arai, F., On-demand, generation, of, droplet, in, size, over, a, wide, range, by, microfluidic, control, 2009, 20th, Anniversary, MHS, 2009, and, Micro-Nano, Global, COE, -, 2009, International, Symposium, on, Micro-NanoMechatronics, and, Human, Science, 5352074, 139, 144, 10.1109/MHS.2009.5352074, Conference, Paper 日本国内 [1] L.Feng, Y.Yamanishi, T.Kawahara, M.Hagiwara, K.Kosuge, and F.Arai, “Robot-on-a-chip Part 1: On-chip Generation of Droplets and Size Control,” in 日本機械学会ロボティクス・メカトロニクス講演会, 2010, pp. 1P1–U04. [2] 萩原将也, 川原知洋, 馮林, 山西陽子, and 新井史人, “双腕マイクロアームの高精度な非接触操作,” in 第22回化学とマイクロ・ナノシステム研究会, 2010, p. P.26. [3] 萩原将也, 川原知洋, 馮林, 山西陽子, and 新井史人, “マイクロ流体チップ内で超高速動作する双腕マイクロロボットによる細胞操作・切断,” in 第28回日本ロボット学会学術講演会, 2010, pp. 2M2–7. [4] L.Feng, Y.Yamanishi, T.Kawahara, M.Hagiwara, K.Kosuge, and F.Arai, “Generation of Droplet with Feedback Control on a Chip,” in 第22回化学とマイクロ・ナノシステム研究会, 2010, p. P.25. [5] L.Feng, Y.Yamanishi, T.Kawahara, M.Hagiwara, K.Kosuge, and F.Arai, “On-chip Size-controllable Droplet Generation,” in 第11回 計測自動制御学会 システムインテグレーション部門講演会, 2011, pp. 3I2–3. [6] L.Feng, Y.Yamanishi, T.Kawahara, M.Hagiwara, K.Kosuge, and F.Arai, “On-chip Smooth Enucleation by Hydraulic Force Control Using Magnetically Driven Microtool,” in ロボティクス・メカトロニクス講演会, 2012, pp. 1P1–U04. [7] 平野 達彦, 川原 知洋, ウベット フセイン, 馮林, 新井 史人, “ローディング機構を有する単一細胞分注システム” in第12回 計測自動制御学会 システムインテグレーション部門講演会, 2012, pp. 1P1–U04 |
