机械学院专栏《科苑·星坛》第十三期准时启航!本期将为大家介绍冯仰刚老师。冯老师长期致力于可穿戴机器人、柔性传感与人机交互等前沿交叉领域,在机器人智能康复、人机共融控制等方面取得了多项创新成果。本期将为本科生提供“主被动一体无源等速机器人的原理探究和设计评估”和“柔性光学波导传感与人机交互研究”小微项目。欢迎感兴趣的同学加入,共同探索可穿戴机器人的前沿应用!
01 个人简介

冯仰刚,副教授,博士生导师,2019年7月博士毕业于北京大学,可穿戴机器人方向,同年9月加入东京大学,任东京大学特别研究员,2021年5月加入北航机械学院机器人所。以一作/通讯发表15篇文章,包括IEEE TRO(2篇,一作,机器人领域顶刊,长文)、Nature Communications(共同一作&共同通讯)等机器人和传感领域Top期刊,担任IEEE TNSRE(A类期刊)副编委。获国家重点研发计划课题、北京市昌平区青年人才、日本科学技术振兴机构(JST)个人资助等项目支持。
02 学术成果
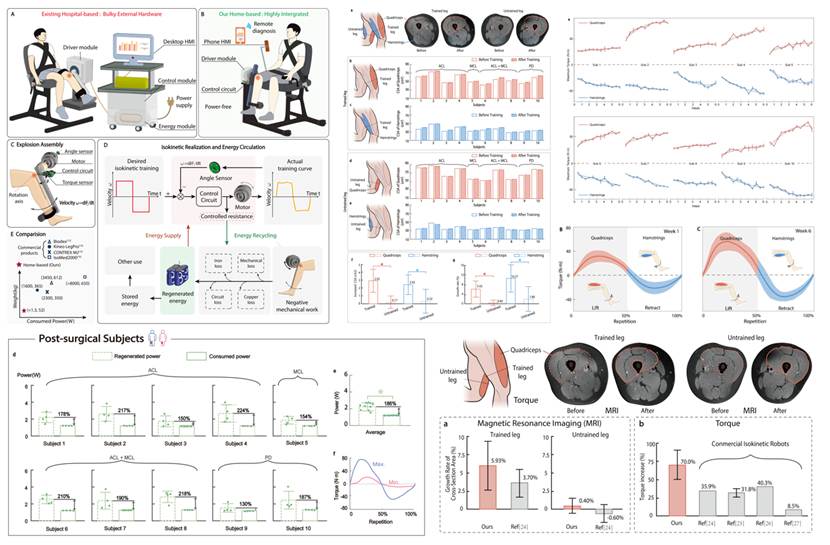
1.自供电膝关节等速训练机器人:
针对传统等速康复机器人体积庞大,耗电量高,价格昂贵的特点,设计了一款针对居家康复场景的无源等速康复训练机器人。该机器人通过动态能量再生的原理采集训练中的能量,结合低能耗控制方法,实现“无电池”的等速训练。临床试验表明本研究所提出的机器人临床康复效果达到甚至超过传统等速设备。
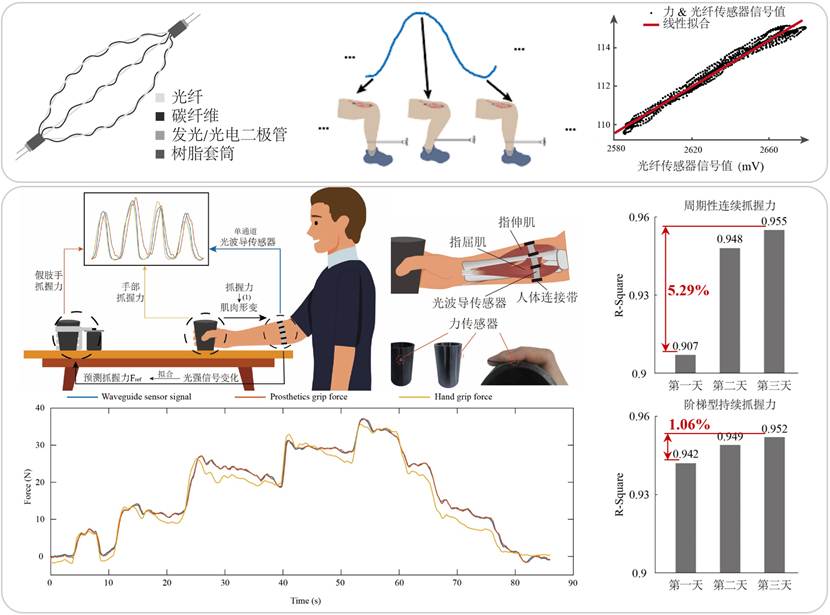
2.柔性传感与智能穿戴康复机器人
本项目围绕柔性光学波导传感技术,开展人机交互与康复运动感知相关研究。通过设计传感器结构,实现肌肉形变、关节运动及力反馈的实时监测。结合机器学习与神经网络算法,项目旨在实现运动参数的高精度识别与肌肉三维轮廓重建,为未来的智能康复机器人与可穿戴设备提供感知方案。
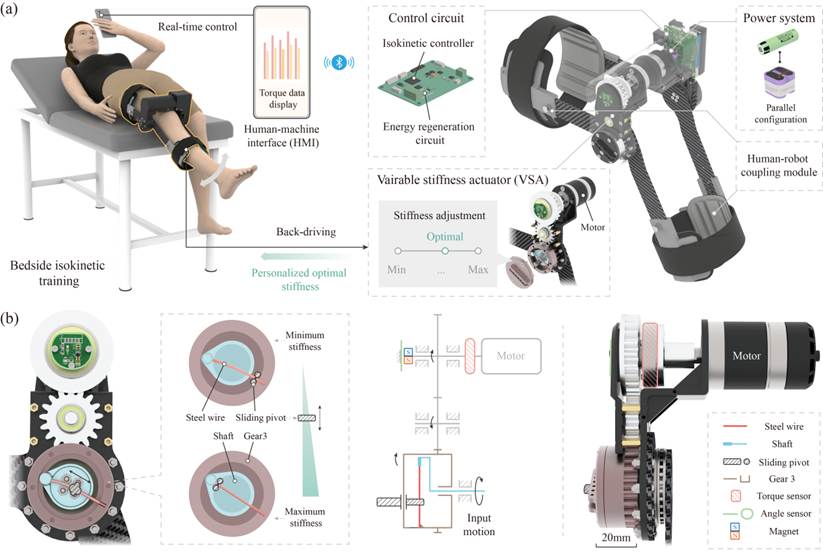
3.床旁膝关节等速抗阻训练机器人
传统等速康复训练设备体积巨大使用成本高昂,在此背景下,团队开发了一种轻便的床旁等速抗阻训练机器人,针对传统等速设备关节无柔性、能耗高的问题,一方面在等速训练机器人中创新加入轻便紧凑且变刚度范围达5.0-137.3 Nm/rad的变刚度机构,提升人机交互柔顺性与安全性,并拟定兼容患者差异的最优刚度测定方法,为个性化训练提供新思路;另一方面基于动态电能再生实现等速控制,在不额外增加硬件结构的前提下回收人体抗阻能量供电,显著延长续航(120°/s 速度下提升57.8%),优化人机能量利用效率。
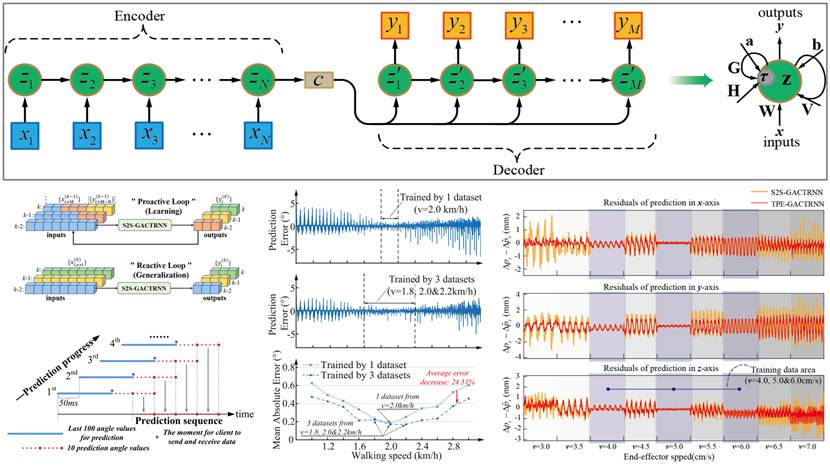
4.类神经启发下时序周期信号预测与泛化技术
基于模型和预设的控制技术与算法存在一定局限性,难以保证复杂与变速工况下的适应性。针对该类机器人中的时序与变周期信号,提出了基于类脑智能启发下的门控自适应连续时间循环神经网络。实现了下肢外骨骼步态信号,与机械臂轨迹误差序列的预测与泛化。
03 项目介绍
1.主被动一体无源等速机器人的原理探究和设计评估
l 项目简介
等速训练机器人被广泛用于多关节术后患者的肌力评估与康复,在此我们提出一种基于动态能量再生技术的主被动一体等速训练机器人。通过将被动阶段采集的能量用于主动阶段助力训练,实现无源等速机器人的自供电能量循环。并针对特定临床应用场景实现特殊患者的神经肌肉等方面的康复和重建。重点参与康复机器人控制程序的书写和原理验证。
l 所需能力
1) 模拟电路和数字电路基本知识。
2) 简单了解无刷电机控制的基本原理。
3) 简单了解stm32的程序书写,有运用Matlab基本数据处理能力。
l 相关事项
1) 项目周期:参与3-6个月,每周不少于2次。
2) 所需人数:1~3人。
3) 实验室会提供优秀学生独立文章发表、学科竞赛的机会,并给予支持。
l 联系方式
电子邮箱:wuhaoyang@buaa.edu.cn
2.柔性光学波导传感与人机交互研究
l 项目简介
设计传感器结构,感知肌肉形变、关节运动及力反馈。结合机器学习与神经网络算法,实现运动参数的高精度识别与肌肉三维轮廓重建。工作包括柔性光学传感器设计与制备(材料选型、模具制作、光路调试),信号采集与算法建模(STM32 ADC采集、滤波与特征提取、基于python的肌肉轮廓实时数学建模),以及实验验证与人机交互测试(肌肉形变检测、步态与动作识别、数据可视化)。
l 所需能力
硬件方向(任选其一或组合)
1) 熟悉STM32嵌入式平台,了解传感器接口、ADC、串口通信 等基础电路知识。
2) 熟悉Solidworks等机械设计软件,熟悉简单的模具设计。
算法与软件方向
1) 熟悉Python,能使用NumPy、Matplotlib、PyTorch,了解基本的神经网络模型或LLM模型。
2) 有信号处理经验(滤波、特征提取)者优先。
l 相关事项
1) 项目周期:能持续参与6个月以上(每周至少进实验室2–3次)。
2) 所需人数:2~3人。
3) 有机会参与论文撰写、论文署名与学科竞赛。
l 联系方式
电子邮箱:julinhang@buaa.edu.cn
