机械学院专栏《科苑·星坛》第十四期准时启航!本期将为大家介绍任子宇老师。任老师长期深耕仿生机器人与生物力学、面向医疗场景的微型软体机器人等前沿方向,在磁性软材料微加工、小尺度多模态运动机理、仿生流体操控等领域取得了多项成果。本期将为本科生提供“微小型仿生软体机器人的运动控制研究”小微项目,欢迎对机器人、智能材料、生物力学等领域充满热情的同学加入,共同助力机器人技术向更柔韧、更智能、更融合的方向发展!
01 个人简介

任子宇,博士,北京航空航天大学机械工程及自动化学院教授,博士生导师,国家级青年人才。本科、硕士毕业于北京航空航天大学机械工程及自动化学院,博士毕业于瑞士苏黎士联邦理工学院/德国马克斯普朗克智能系统所,在德国马克斯普朗克智能系统所物理智能系进行博士后研究。教授课程《离散数学》《离散数学(进阶)》《AI赋能机器人技术》《Mechatronics Engineering》。从事仿生机器人与生物力学、面向医疗场景的微型软体机器人等研究。近年来主持并参与国家自然科学基金等项目。在包括Science Robotics、Science Advances、Nature Communications、PNAS、TMECH等期刊发表论文40余篇,ESI高被引论文2篇,入选工业工程与自动化领域2025年全球前2%顶尖科学家榜单。获2015年CLAWAR会议最佳技术论文奖,2019年机器人顶级会议RSS最佳论文奖,苏黎世联邦理工学院的优秀博士学位论文奖(ETH奖章)。
02 学术成果
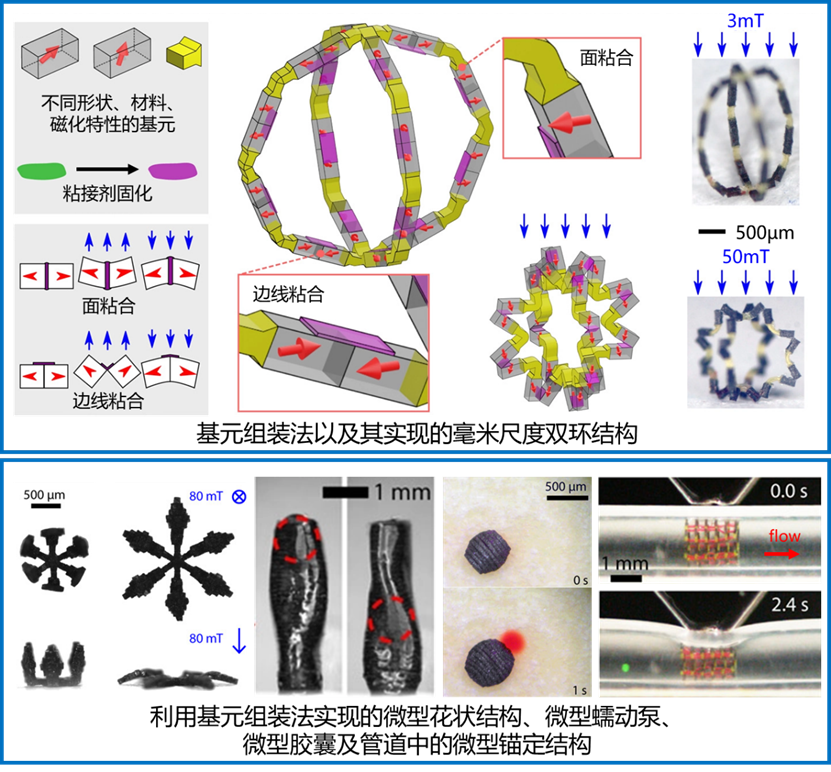
(1) 磁性软材料微加工技术
针对现有微型软体磁驱机器人受限于加工技术,难以实现复杂三维形状、非均一材料构成及磁化方向预编程,从而导致运动与功能受限的问题,提出了一种微组装基元加工方法,建立了从有限元结构设计、基元离散制造到利用微模具克服表面力干扰的精密组装工艺流程,实现了亚毫米至毫米尺度下具有复杂材料分布与特定磁化特征的微型医疗机器人(如微型蠕动泵、胶囊及锚定结构等),并进一步将相关技术推广至微米尺度,实现了微米级磁性双面微粒的组装及复杂三维微结构的高精度制造。
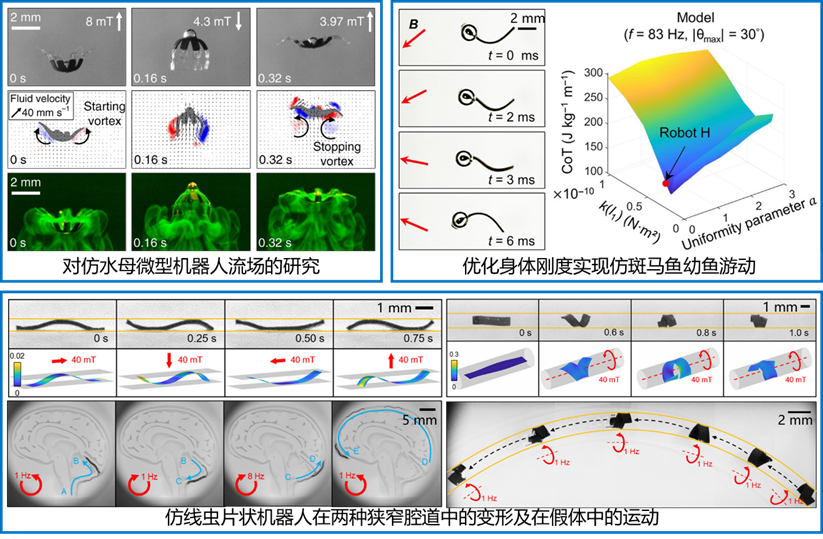
(2) 小尺度多模态仿生软体运动机理研究
针对面向医疗应用的微型软体磁驱机器人在体内复杂流体环境(如静态液体腔体、动态流速水域及狭窄充液管腔等)中运动能力受限的问题,汲取自然界微小生物的运动机理指导仿生设计,建立了中雷诺数下的流固耦合模型与机器人动力学理论,揭示了仿水母游动中的涡旋辅助非接触操控机制、仿斑马鱼高频游动中的刚度-效率匹配规律,以及仿线虫在受限空间内利用被动形变与环境交互的推进机理,实现了具备多模态运动、选择性物质输运及复杂狭腔适应能力的一系列微型仿生软体机器人。
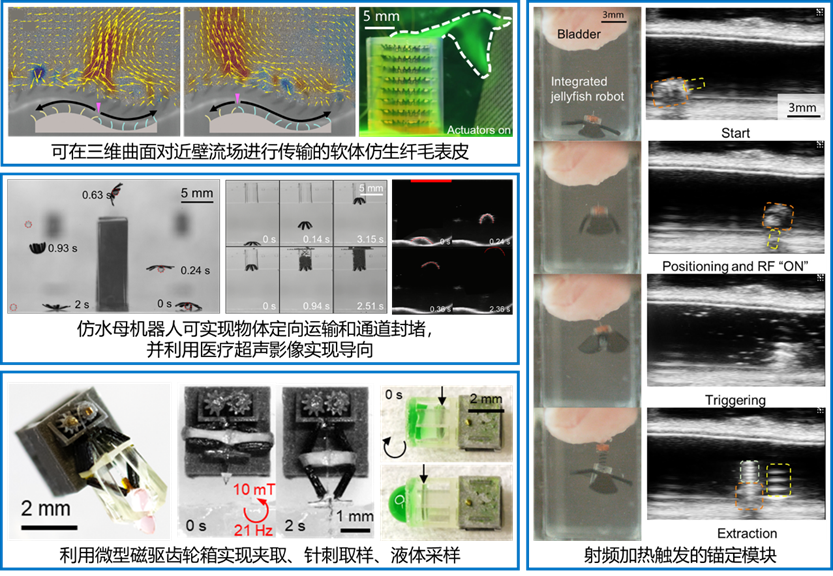
(3) 仿生流体操控与微型功能模块的原理、设计与实现方法
针对微型软体机器人因受限于加工工艺、载荷体积及供能控制而难以集成复杂医疗功能的问题,提出了基于软体本体运动调控流场的功能增强策略与高功率密度微型模块集成方案,建立了利用电控仿生纤毛阵列对近壁流场进行多维灵活操控的方法,实现了基于改进型仿水母机器人的药物输运、腔道封堵及超声引导下定点贴附;研制了高减速比微型磁驱齿轮箱,突破了小尺度下磁驱动力不足的限制,实现了针刺活检与液体采集;提出了基于射频电场加热的远程触发机制,开发了按需锚定与靶向给药模块,解决了磁驱运动与功能触发信号间的耦合干扰难题。
03 项目介绍
(1) 项目简介:
微小型仿生软体机器人的运动控制研究
软体机器人具有超冗余自由度及连续体变形特征,其运动模式与环境存在强烈的非线性耦合,使得基于模型的传统控制方法难以适用。相比之下,自然界微小生物虽神经系统简单,却能借助“形态计算”机制,通过神经回路与身体结构的动态耦合实现高效运动。因此,揭示微小生物的神经-形态协同机理,构建融合具身智能的新型仿生控制架构,是实现微小型软体机器人高效、鲁棒控制的各种亟待突破的关键课题。
(2) 所需能力:
(a) 具备机电系统构建与机器人软硬件集成的基本能力
(b) 具备线性代数、数理统计或机器学习等学科的基本数理素养
(c) 具备对科学问题进行长期钻研与深入思考的潜质
(3) 相关事项
(a) 项目周期:6个月-1年
(b) 所需人数:1-3名本科生
(4) 联系方式
电子邮箱:renzy@buaa.edu.cn
04 老师寄语
愿同学们怀揣对未知的好奇与求索,拥有大胆想象与即刻行动的魄力!
