近日,北京航空航天大学机械工程及自动化学院机器人研究所的丁希仑教授、张武翔教授、冯仰刚副教授团队,联合北京大学王启宁教授和中国科学技术大学王柳教授,在机器人领域知名期刊《IEEE Transactions on Robotics》上发表了题为“A Wearable Isokinetic Training Robot for Enhanced Bedside Knee Rehabilitation”的研究论文,丁希仑教授、张武翔教授、王启宁教授、王柳教授和冯仰刚副教授为该文的共同通讯作者,冯仰刚副教授和胡兴宇硕士为共同第一作者,北京航空航天大学为第一完成单位。
随着膝关节损伤人群不断增多,康复需求激增,为我国的医疗资源带来挑战。然而,膝关节损伤人群伤后或术后卧床时期很少有定量化康复训练设备可用,传统等速康复训练设备体积巨大使用成本高昂,在此背景下,团队开发了一种轻便的床旁等速抗阻训练机器人,并通过6例膝关节损伤患者的长期康复训练试验验证了康复效果,一定程度上填补该领域的空白。
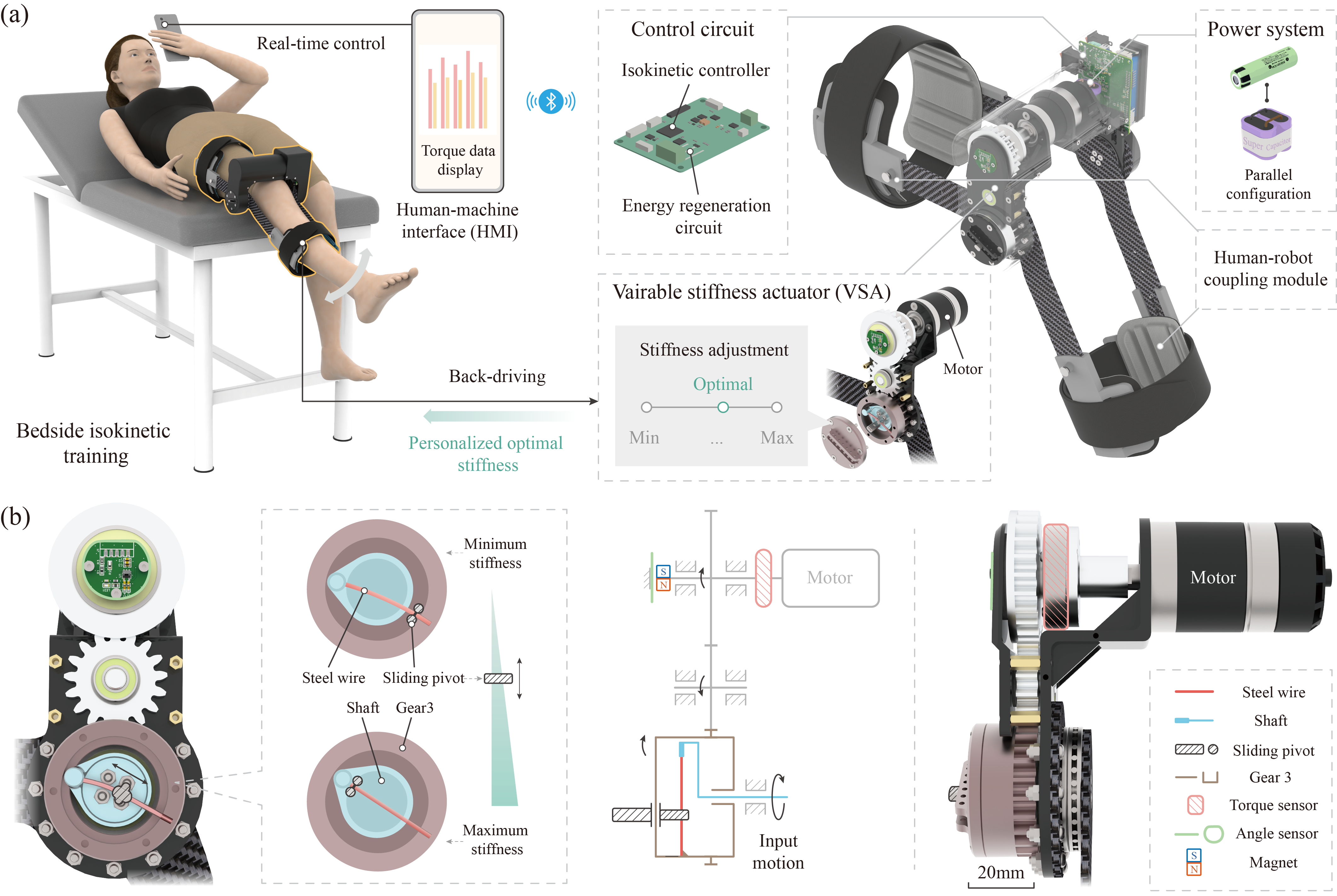
图1. 床旁等速抗阻训练机器人总览
其次,针对传统等速设备关节无柔性的特点,创新地在等速训练机器人中加入变刚度机构,提高人机交互柔顺性和安全性。设计一种新颖的变刚度机构,在保证轻便、紧凑的同时实现了较大的变刚度范围(5.0-137.3Nm/rad)。同时研究不同的刚度对等速训练效果的影响,拟定了兼容患者人群差异的最优刚度测定方法,为等速训练个性化提供了一种新思路。
此外,针对传统等速设备能耗高的特点,基于动态电能再生实现了机器人的等速控制,可显著提升机器人续航(120°/s速度下可增加57.8%)。在等速训练机器人中引入动态电能再生方法,在原有硬件基础上几乎不增加额外的机械结构和电路,实现了等速控制,且回收了人体抗阻耗散的能量并储存再给传感和控制电路供电,从而延长机器人的续航时间,优化了人机能量利用效率。
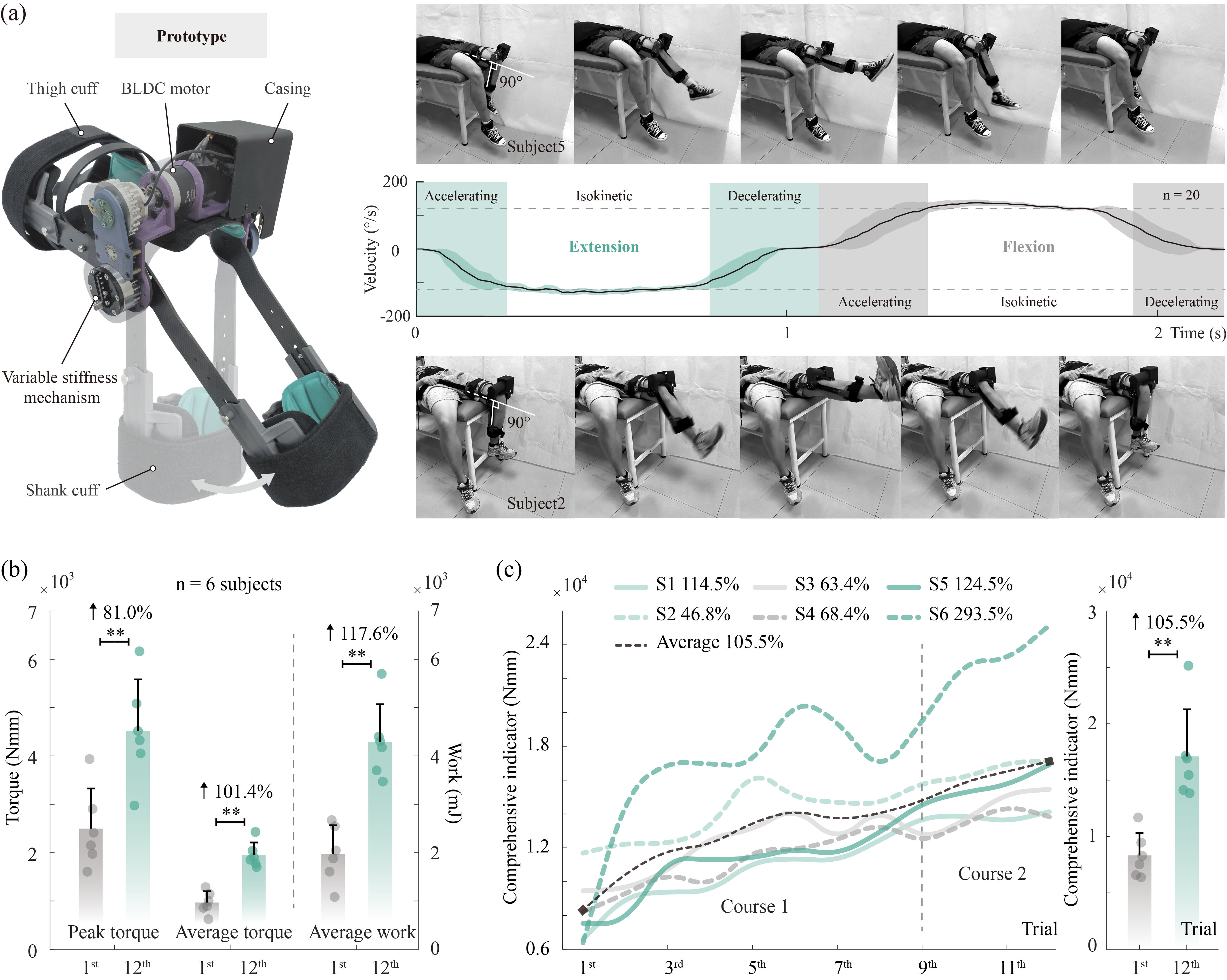
图2. 长期训练康复效果
为了评估所提出机器人的康复效果,6名膝关节损伤患者参加了为期3周共12次的长期床旁等速康复训练。研究记录了12次训练中等速肌力的增长,进而对比受试者峰值力矩、平均力矩、平均功和综合指标(CI)在训练前后的变化。结果显示,训练后,受试者总体峰值力矩增长为81.0%,平均力矩增长101.4%,平均功增长117.6%,综合指标增长105.5%,均有显著性提升。这些数据表明,机器人在促进术后膝关节康复方面具有显著效果。
综上所述,本研究提出了一种面向膝关节损伤康复初期的床旁等速抗阻训练机器人。该机器人集成了紧凑的变刚度机构,运用动态能量再生方法提升了机器人的续航时间,同时也可以实现高效的床旁膝关节等速康复训练。
该研究合作单位包括北京大学第三医院、航天智能院、北京理工大学、北京大学和中国科学技术大学,得到了国家重点研发计划、国家自然科学基金、北京大学第三医院创新与转化基金、北京理工大学高层次人才研究基金、中央高校基本科研业务费专项资金和宁波市“科创甬江2035”重点研发计划等资助。
文章链接:
https://ieeexplore.ieee.org/document/10930582
