首页 > 学院新闻
学院新闻
2016-04-07
2016-03-22
2016-03-16
2016-03-15
2016-03-04
2016-02-27
2016-01-01
作者: 发布: 2026-07-30
面对前序高校招生计划扩容、招生政策持续加码、兄弟高校猛烈冲击的复杂局面,河北招生组百余名师生分赴11地市开展30余场高招咨询会,充分发动校友资源,精准真诚细致开展集中回访,录取位次高位稳固!
2026年6月24日至7月2日,北京航空航天大学河北招生组在河北高质量开展招生宣传工作。北航河北招生组组长、北航机械工程及自动化学院党委书记从保强、院长陈华伟带队,组织教职工、专兼职辅导员、学生骨干、河北籍学生及校友共计100余人前往河北各地区、中学开展招生咨询工作。
招生组联动石家庄广播电视台、石家庄新闻广播、衡水广播电视台等3家地方权威媒体,有效提升宣传的触达率和宣传效果。充分发动校友资源,精准真诚细致开展集中回访。在石家庄驻地酒店举办专场招生宣讲并坚持每日面谈直至志愿填报"交卷"最后一刻,累计精准对接600余名目标意向考生,有力确保了生源质量的高位提升。
物理组收分675分,省排799名,最高分691分,省排135名创近年新高。生源结构进一步优化,与前位高校分差由4分缩小至2分,80%以上生源达到前位高校投档线(较去年提升36%),与后位高校分差拉大至4分,稳居高校第9位!
历史组收分644分,省排477名,在排名由24年第11名跃升至25年第9名后,保持高位稳定!
国家、高校专项高分收官,超越上交、复旦、南大,仅次于清北、中科大、浙大,由去年第6位升至第5位!
大中贯通示范区成效显著,与石家庄二中、唐山一中等常态化开展实践活动,共建国优计划实践基地、具身智能机器人科创实验室。石家庄二中强基计划录取6人,在我校全国生源中学中数量位居第一!
北航河北招生组前往石家庄市、衡水市、唐山市、承德市、廊坊市、秦皇岛市、邯郸市、张家口市、保定市、沧州市、邢台市共11地33所中学开展现场高考招生咨询工作,覆盖全省主要生源区域。



同时,招生组在驻地设立线下咨询点,持续一周不间断为考生和家长提供一对一定制化咨询服务,面谈直至志愿填报“交卷”最后一刻,为河北考生了解北航最新招生细则与报考方向提供针对性指导。


为拓宽咨询渠道、覆盖更多考生,招生组同步建立QQ线上答疑群并开通电话咨询热线。从优势学科到培养特色,从校园文化到发展前景,招生组成员以专业细致的解读和真诚务实的态度,帮助考生全方位了解北航、走近北航。


为深入推进北航在冀招生工作、全方位展示北航学科实力与人才培养特色,6月28日下午,北航河北招生组在石家庄举行大型高考招生宣讲会。
从保强、陈华伟、北航河北招生组副组长李时宇、知名高等教育评估学者黄瑞勇、马克思主义学院教授付丽莎、机械工程及自动化学院教师吴琼以及来自各学院的北航河北招生组教师为现场百余位考生和家长答疑解惑。

6月26日至28日,从保强受邀参与河北省石家庄广播电视台《直击中高考》直播活动,在石家庄向全省考生介绍北航办学情况、河北招生计划。李时宇受邀参与河北省石家庄广播电视台《高招大论坛》直播活动,面向全省考生全面介绍北航办学特色、学科实力及2026年在河北招生政策。

学校领导始终关心与和支持河北招生工作,6月2日,副校长邓怡带队赴石家庄二中参加共建“具身智能机器人创新实验室”揭牌仪式。河北省教育考试院党委书记、院长郝艳红,石家庄市第二中学党委书记宋伟、校长宋泽亮等出席活动。


依托实验室优质科创平台,河北招生组联合机械学院组建启航导师团队,常态化走进石家庄二中开展科创教学工作。团队精心打造“理论+实操”阶梯式机器人科创课堂,累计开展八次系统化科创课程,搭建起一套青少年科创学习体系。

课程涵盖基础启蒙、建模编程、整车实操全阶段教学内容,教学过程中,导师团队针对性指导学生开展机器人结构优化、程序调试、场地实战等专项训练,以实践教学夯实学生科创基础。
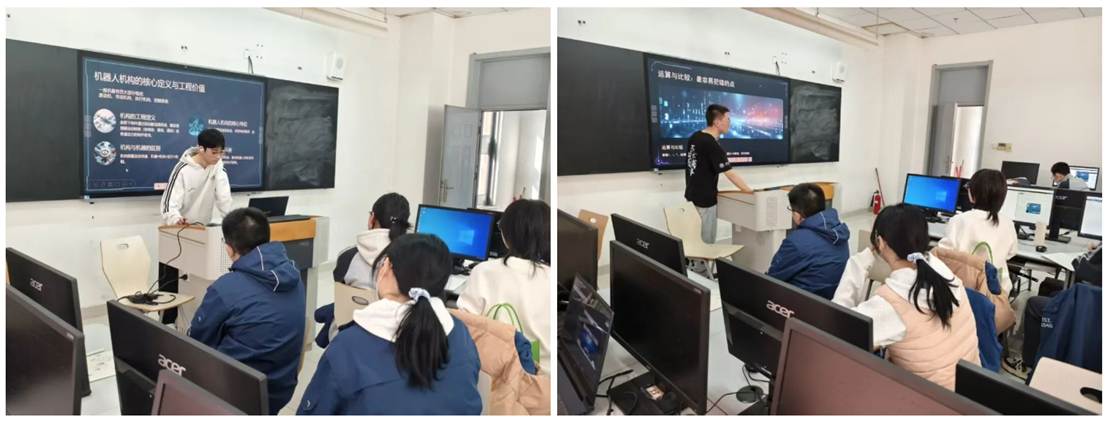
坚持以赛促学、以赛促练的育人理念,积极带领学生参与科创赛事。在首次参赛中,启航导师指导二中学生科创团队斩获京津冀地区一项省级一等奖、两项省级二等奖的优异成绩,成功晋级全国赛事。

情系冀土,贯通大中,过去一年,招生组将北航“空天报国”情怀与科创资源,凝为春风化雨般的陪伴,从“教授进中学”到“启航导师”等各类活动,用心织密大中衔接的育人网络,让更多优秀学子,真正读懂北航、向往北航,最终坚定地走向北航。
2025年10月北航河北招生组在沙河校区三号科研楼629会议室举行2025年河北籍生源座谈会,从保强、李时宇、招生组专兼职辅导员代表、2025级河北籍新生及老生代表、旭风启航实践队代表、启航导师团队代表参会。


2026年1月至2月机械学院“启航导师”团成员分赴唐山一中、武邑中学、衡水一中、曲阳一中、邢台一中、南宫中学6所重点中学开展大中小贯通科创训练营活动,推动实践育人工作走深走实,促进优质科普资源走进校园,搭建大中衔接的育人桥梁。


2026年3月河北招生组邀请宇航学院桂海潮教授、经济管理学院苏文平教授前往石家庄二中、石家庄一中、石家庄精英中学开展座谈交流,系统推进大中贯通与招生宣传系列工作。


3月27日、28日,招生组成员王丹、刘佳镇、王琳琳前往衡水市泰华中学、衡水第十三中学、武邑中学,面向高一高二学子开展招生宣讲工作。招生组成员高磊、闫东升前往石家庄第二中学,面向高三学生家长开展招生宣讲工作。


2026年4月招生组成员李时宇、齐特、王一帆、刘佳镇、许泽龙、王琳琳等前往唐山一中、保定一中、邯郸一中、魏县一中等十余所中学,开展招生宣讲工作,系统介绍了北航的院校优势、专业设置、招生政策以及大类分流等方面的内容,宣讲会现场互动踊跃,反响热烈。

4月17-18日、25-26日,河北招生组邀请经济管理学院苏文平赴衡水中学实验学校、衡水安平志臻中学等学校,面向高三学子和家长开展职业生涯规划与招生政策系列宣讲。

2026年4月28日北航招生工作办公室主任刘睿一行赴河北开展招生宣传与调研交流。刘睿以“向北航行 一路华章”为主题,面向河北省高三考生家长系统介绍学校办学情况、讲解特色专业并解读本年度强基政策、新增专业及培养亮点。答疑环节,从保强等就本研贯通培养、强基培养方案等考生关切问题逐一解答,现场互动热烈。


2026年6月6月14日河北招生组邀请仪器科学与光电工程学院徐立军教授前往顺平县博文高级中学开展宣讲交流,徐立军勉励同学们学贯中西、报效祖国,并耐心解答了同学们在学习中遇到的种种困惑。

逐梦之路有指引,青春奋进终相逢,2026年北航河北高考招生工作圆满收官,感谢各位考生和家长的选择与支持,感谢每一位招生组成员的辛勤付出!
征程不止,未来可期,北航河北招生组将继续以专业的素养和温暖的情怀,深耕燕赵,筑梦引航,助力更多有志学子圆梦北航,各位新北航人,期待金秋九月,与你们相约北航、共赴新程!
